


新規理論とテクノロジーの融合により
航空宇宙工学のイノベーションを
実現する
本研究室では、既存のシステムや理論を単に寄せ集めるだけでなく、
これまでに無い新しい理論や概念を構築することで、
宇宙フロンティアや航空分野で活躍するシステムの開発を目指します。
ドローンの自律飛行制御
マルチローター型ドローンの自律飛行制御に関する研究を行っています。オプティカルフローを用いた障害物検知や、チルトローター機構による高機動飛行制御など、未知環境での安全かつ効率的な飛行を目指しています。
詳しく見る
衛星の軌道・姿勢制御
非ホロノミックシステムの制御
スラスターを用いることで、衛星の位置と姿勢の同時制御を目的とします。また、スラスターの機構上、劣駆動性に加えて入力に一方向・一定値制約を持つため、入力制約を持つシステムになります。
詳しく見る
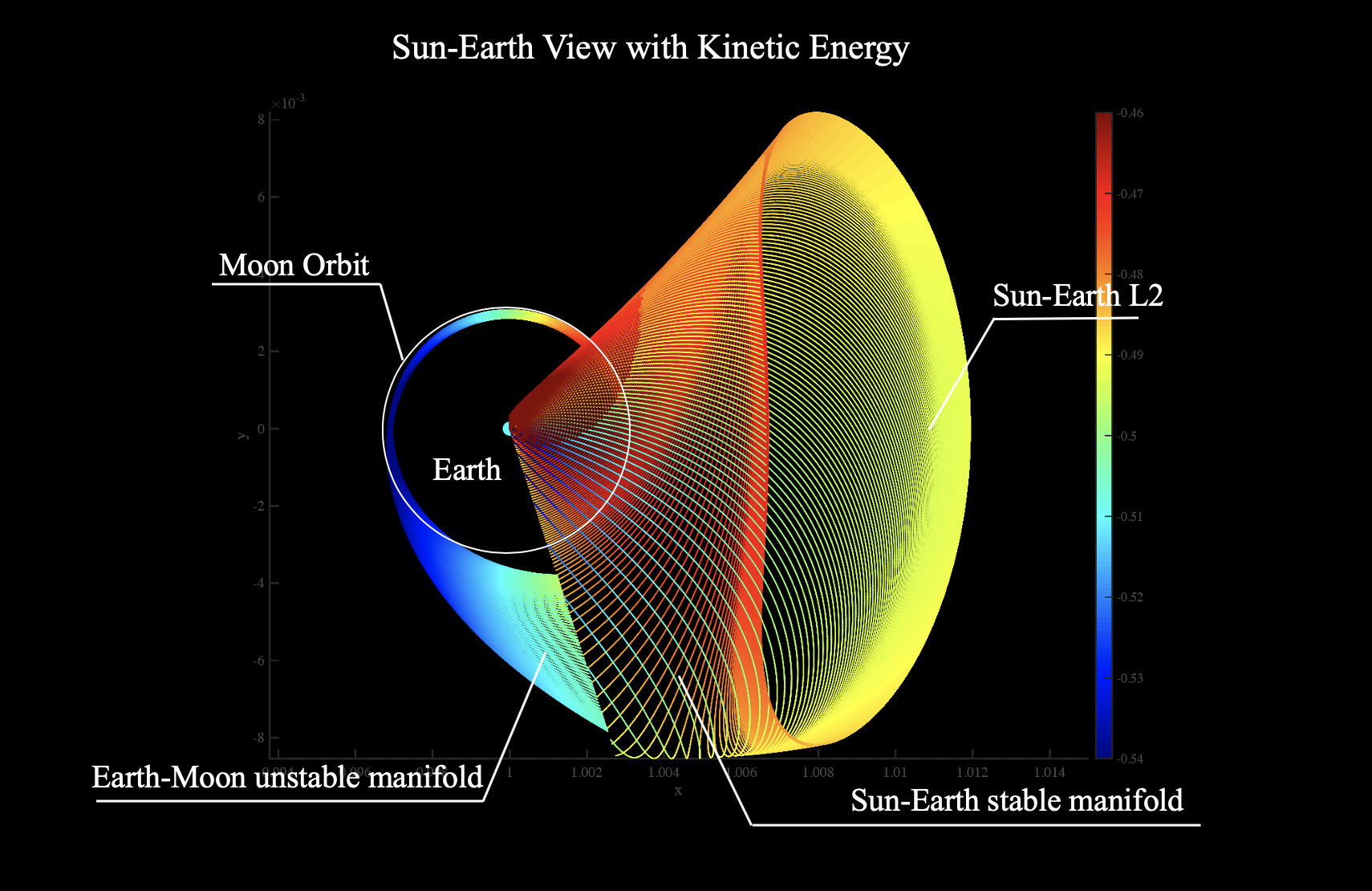
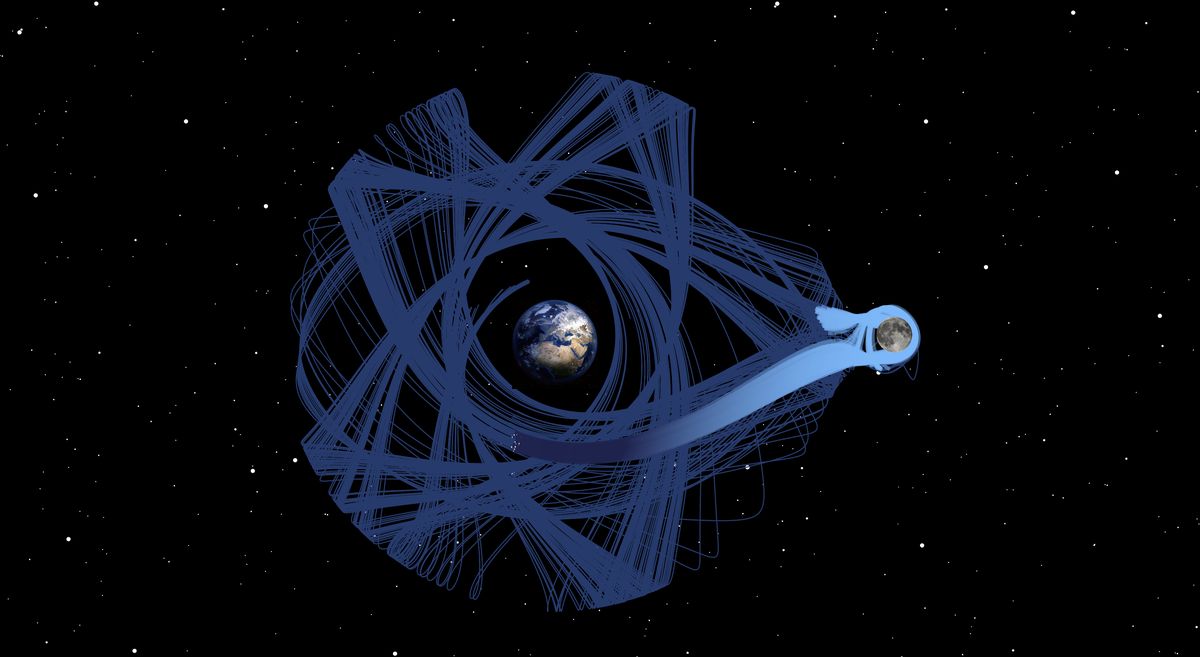
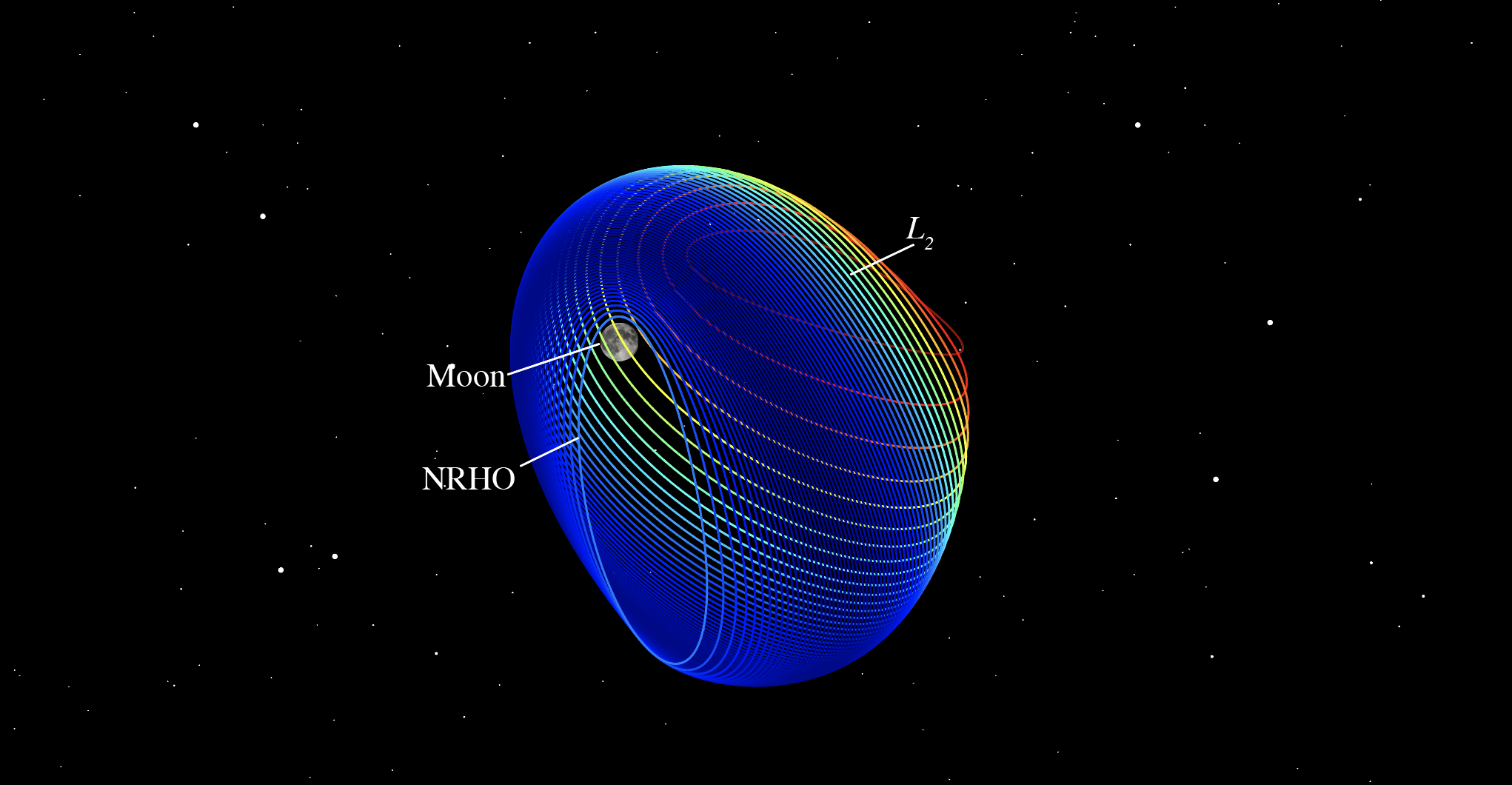
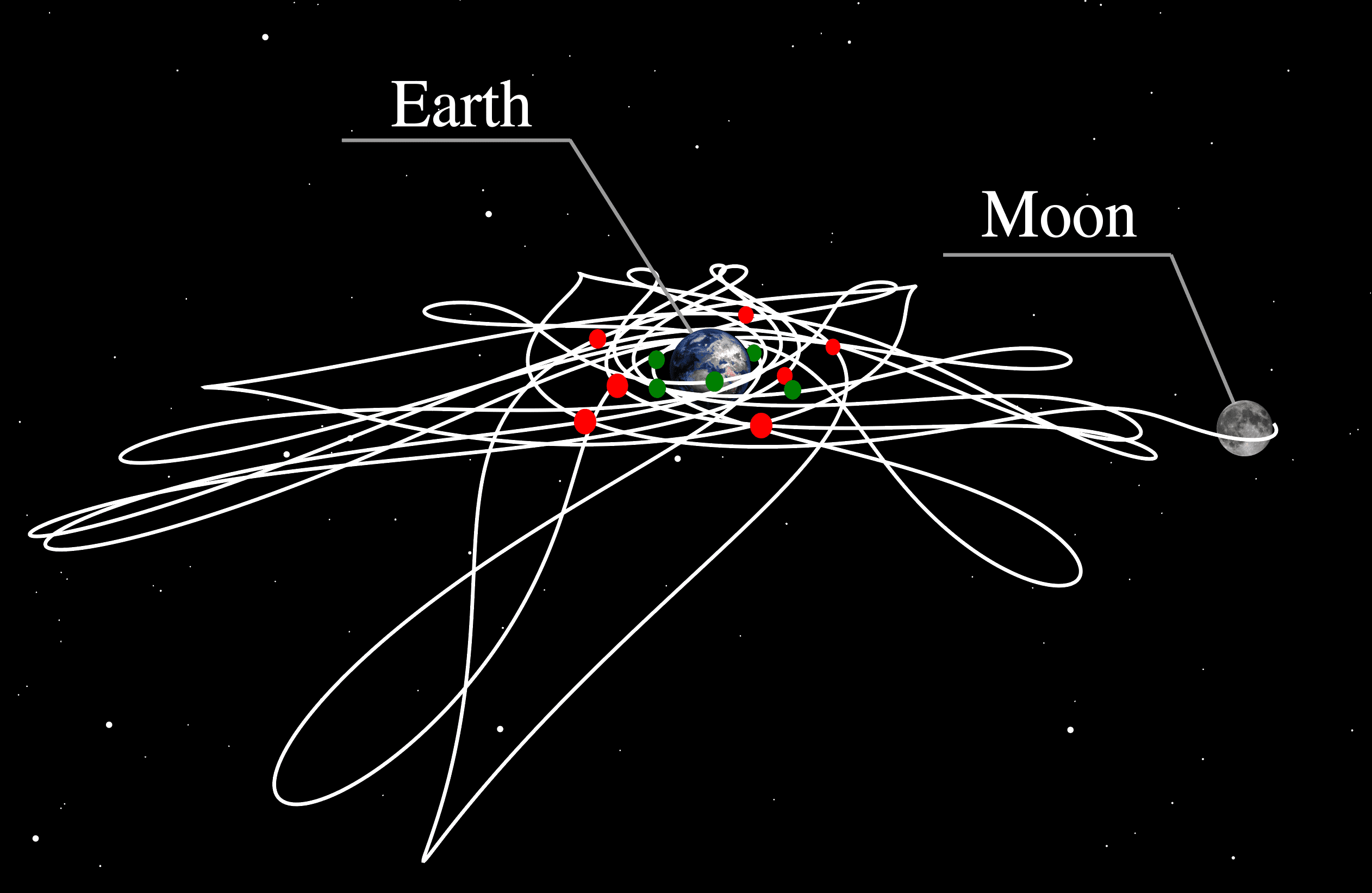
深宇宙探査機の力学と制御
多体問題、特に円制限三体問題において不変多様体などの幾何学的な特徴を利用した新たな軌道設計手法を提案し、ミッション軌道の計算コストの低減化を目指しています。
詳しく見る