


Realization of space engineering
innovation
by fusion of new theory and technology
In this laboratory, we are not only gathering existing systems and theories, by constructing new theories and concepts that have never existed before, we aim to develop systems that are active in the space frontier and aviation sectors.
Autonomous Drone Flight Control
We conduct research on autonomous flight control of multirotor drones, including obstacle detection using optic flow and high-maneuverability flight control with tilt-rotor mechanisms, aiming for safe and efficient flight in unknown environments.
Trajectory and attitude control of the satellite, Control of nonholonomic system
In this research, we aim at simultaneous control of satellite position and attitude by using thruster. Also, due to the mechanics of thrusters, since it has unidirectional and constant value constraints in addition to poor drivability, it has a system with input constraints.
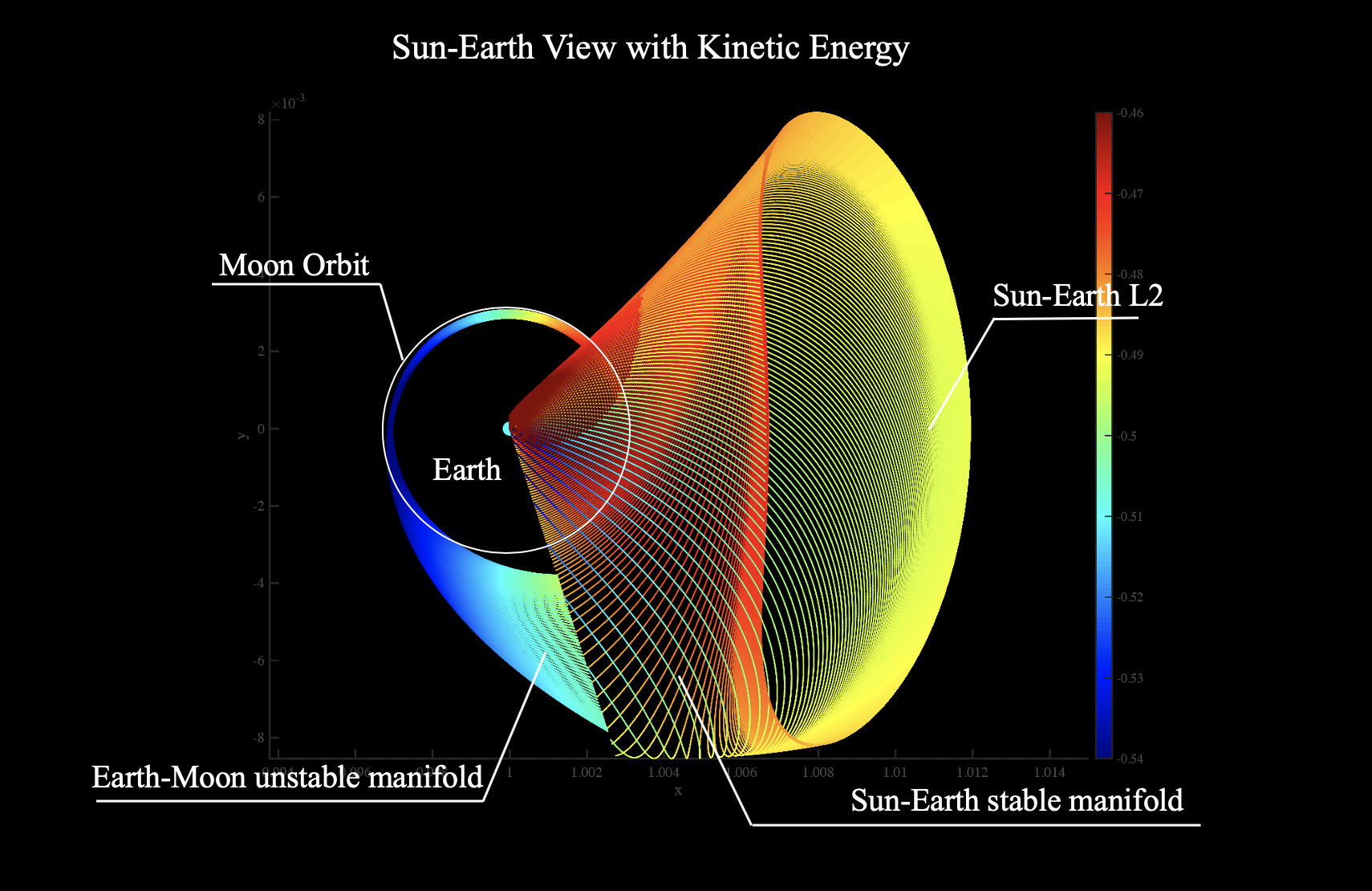
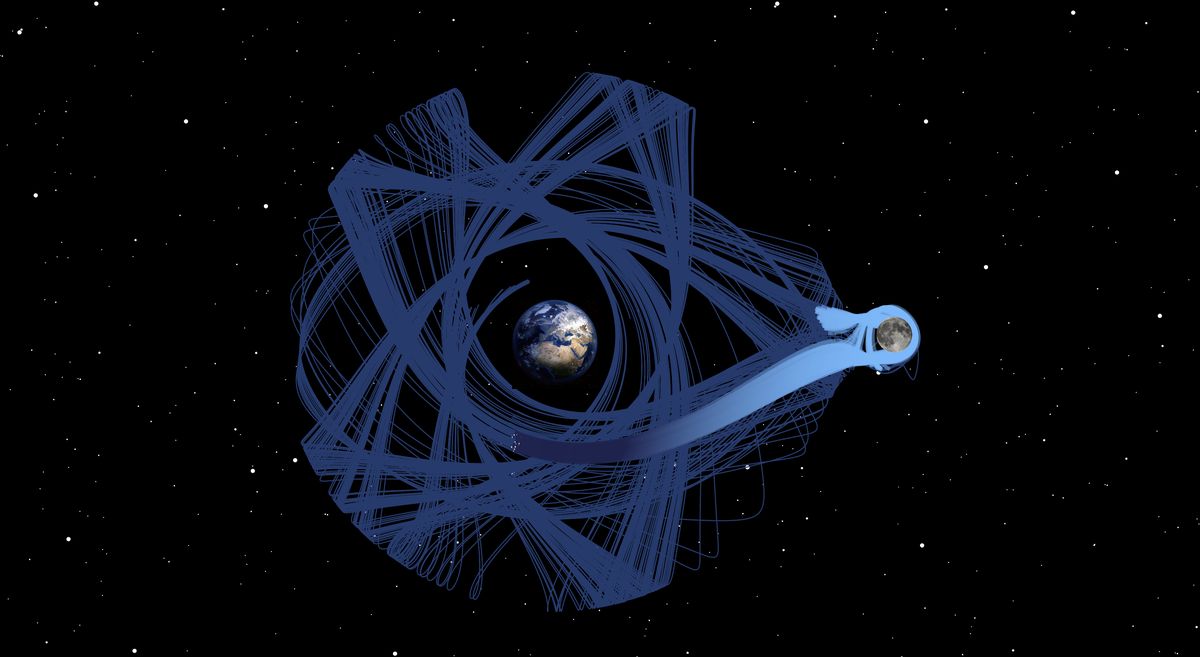
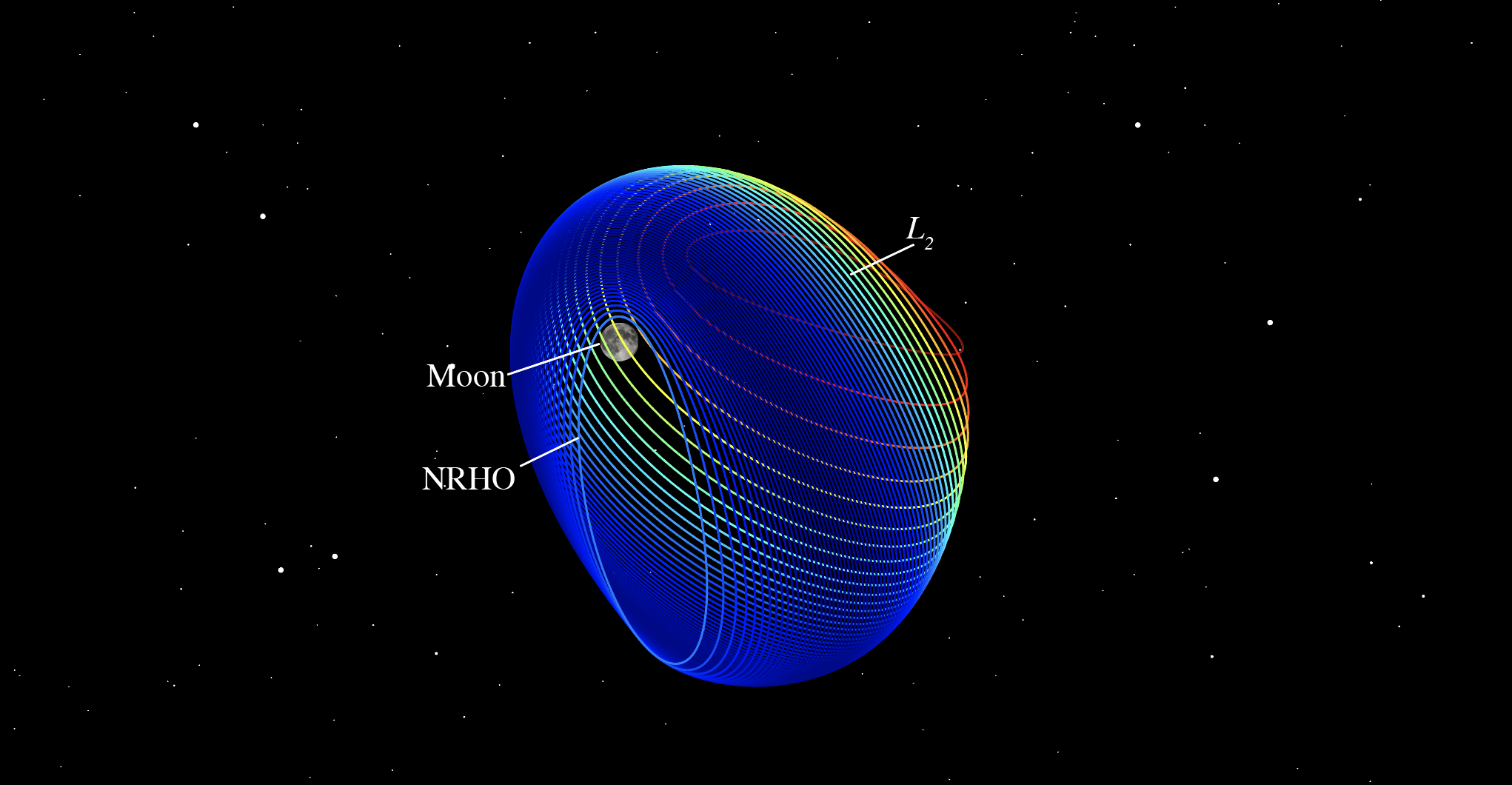
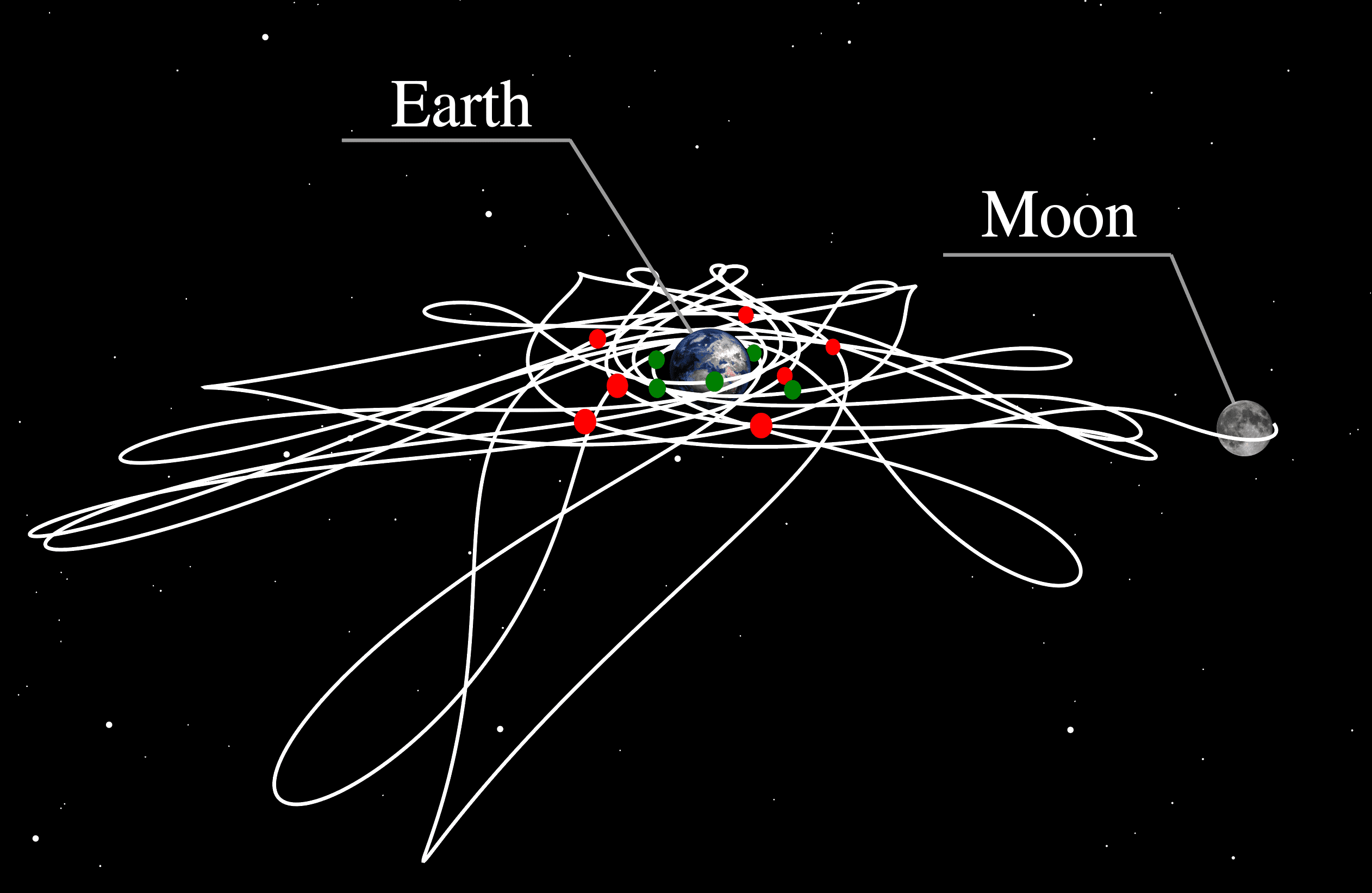
Dynamics and Control of Deep Space Probes
We propose novel trajectory design methods utilizing geometrical features such as invariant manifolds in multi-body dynamics, particularly the circular restricted three-body problem, aiming to reduce the computational cost of mission trajectory design.