World Robot Summit 2025に出場



2025 年 10 月 10 日から 12 日まで福島ロボットテストフィールドで開催された World Robot Summit 2025の 過酷環境F-REIチャレンジ「標準性能評価ドローンチャレンジ」部門に 本研究室の塩塚(博士課程1年)と岡林(修士課程2年)が出場しました。
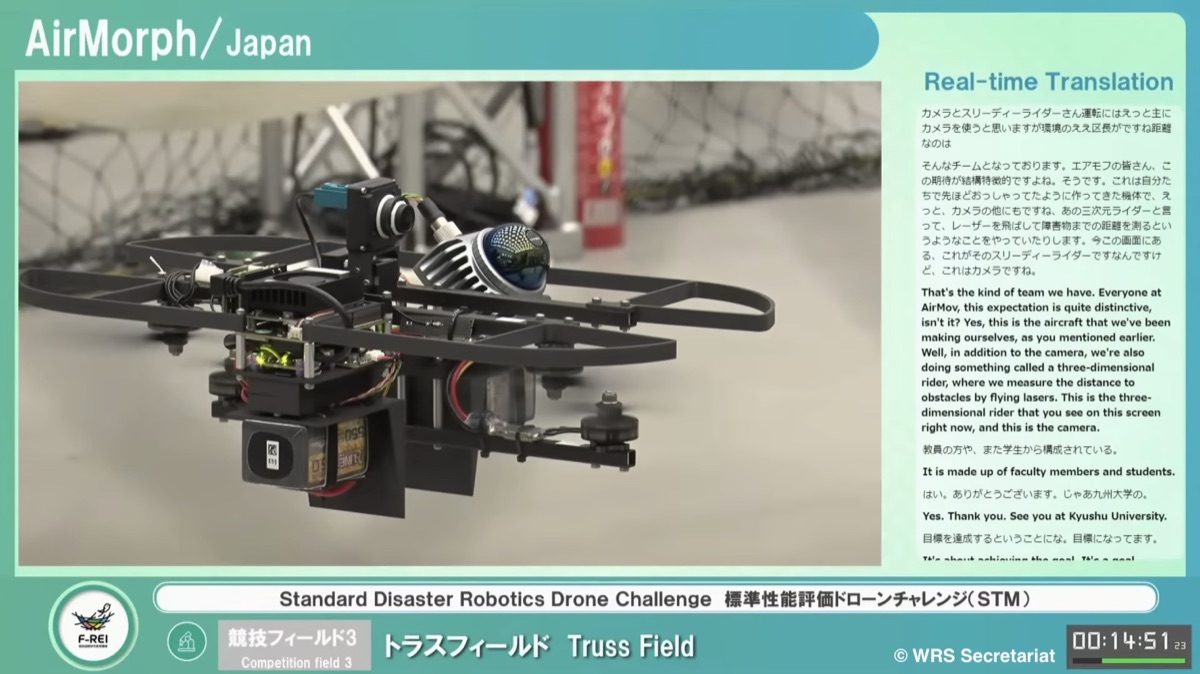
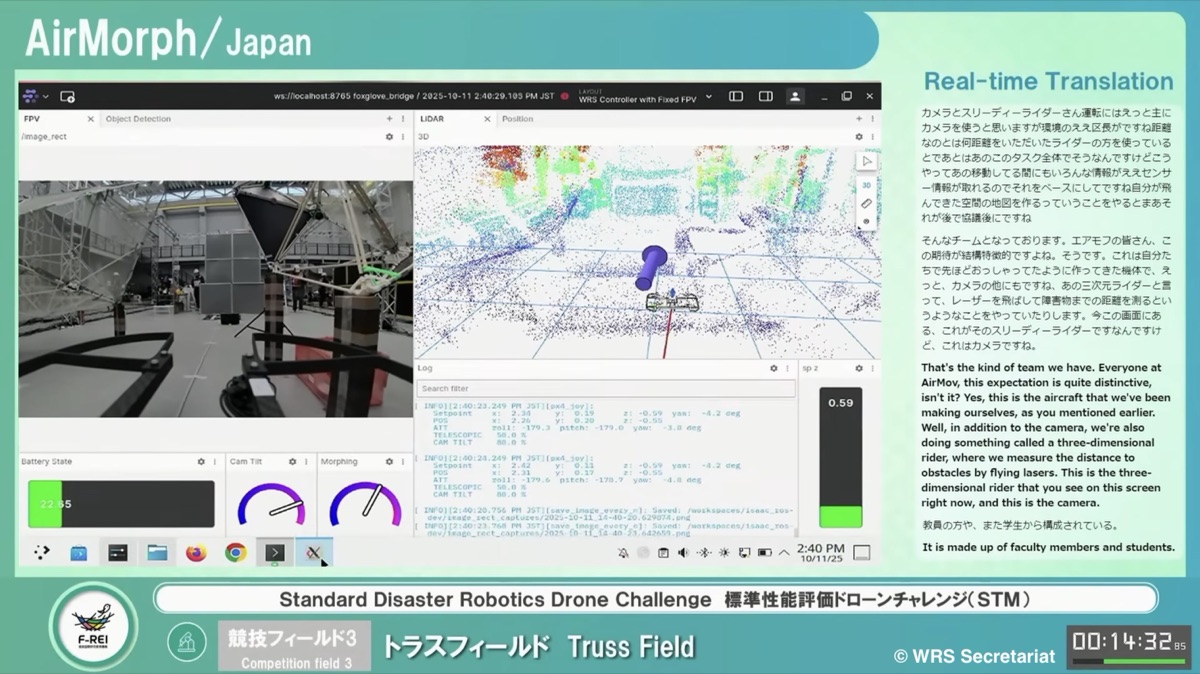
チーム名は「AirMorph」で、本校のシステム情報科学研究院 システム制御研究室の坂口聡範 助教と共同で参加しました。 競技に使用した機体は、坂口助教が開発した伸縮可能なドローンです。ドローンのアーム部を伸縮させることで、狭い空間での飛行を可能とします。 各メンバーの役割分担としては、機体設計・製作を坂口助教、制御システムの構築を塩塚、画像処理システムの構築を岡林が担当しました。
本競技では、災害現場を想定した3種類のフィールドにおいて、災害調査時に必要なドローンの運動性能や探索性能を評価します。 各フィールドには、実際の災害現場を想定した様々なタスクやミッションが設けられており、制限時間内でそれらのタスクを遂行します。 本チームは、予選を通過し、準決勝に進出しましたが、惜しくも決勝進出にはなりませんでした。
開発中および本番には、様々なトラブルが発生しましたが、チーム全員で協力しトラブルを一つ一つ解決することで、最終的に安定した飛行を実現することができました。 本プロジェクトを通して、培った技術力や運用に関するノウハウを今後の研究にも活かしていきたいと思います。
YouTube動画
予選
トラス
垂直スラローム
水平スラローム
準決勝
トラス
URL をコピーしました