Autonomous System
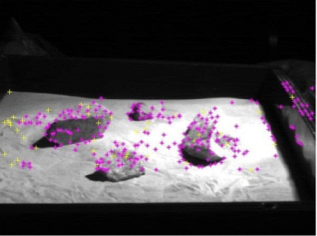
Obstacle Shape Detection via WFI of Optic Flow
Estimating obstacle distance and shape using a wide-field integration method inspired by insect compound eyes.

Optimal Layout of Tilt-Rotor Aircraft
Searching for optimal rotor configurations of tilt-rotor aircraft using particle swarm optimization and dynamic manipulability theory.
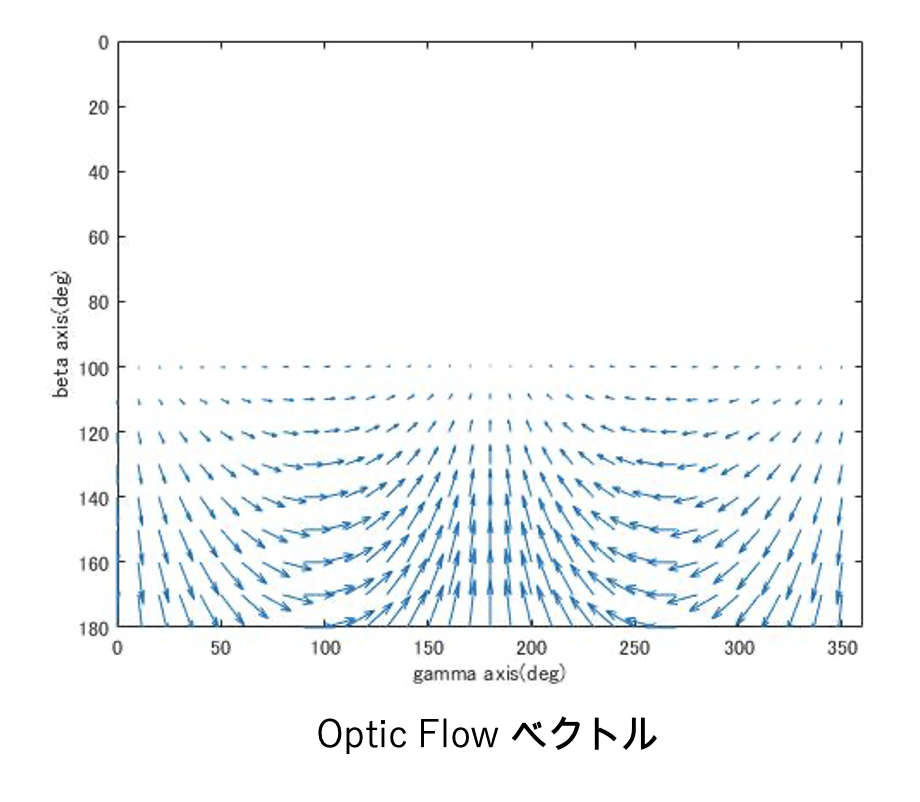
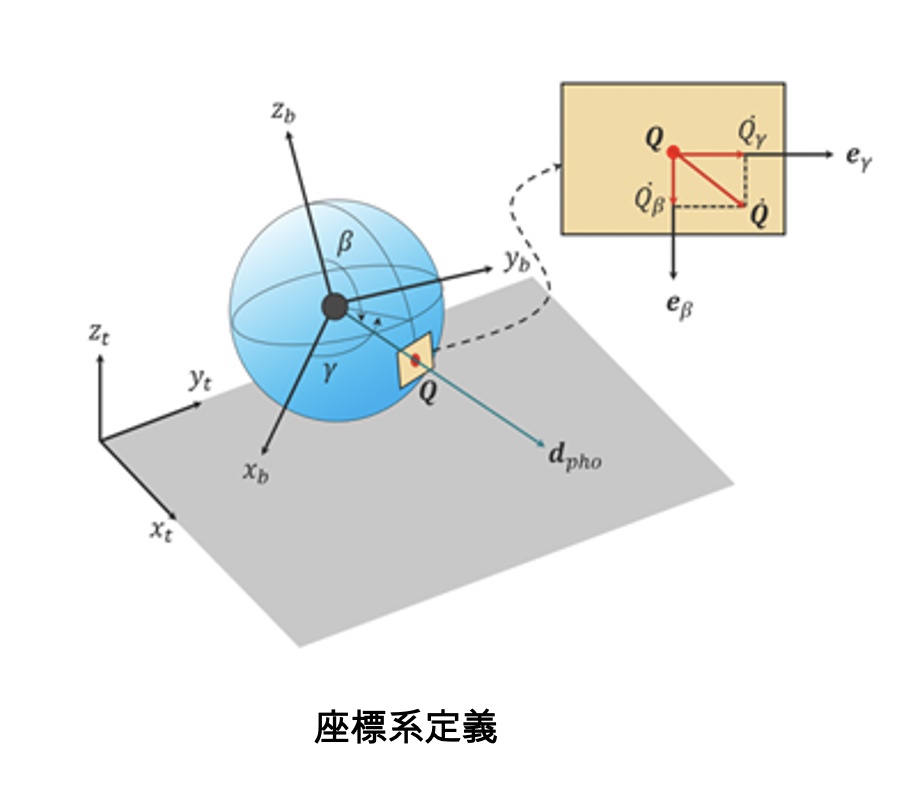
Spacecraft State Estimation from Camera Images
Estimating spacecraft states including attitude angles from camera video using the Wide-Field Integration of Optic Flow method.
Satellite Orbit & Attitude Control
Position/Attitude Control of Underactuated Satellites
Simultaneous position and attitude control of underactuated satellites using thrusters, considering unidirectional and constant-value input constraints.
Formation Flight with Minimal Thrusters
Controlling both attitude and orbit with only four thrusters, also useful as a redundancy system for actuator failures.
Attitude Control via Sliding Mode
Achieving robust satellite attitude control against disturbances and parameter uncertainties through sliding mode control.
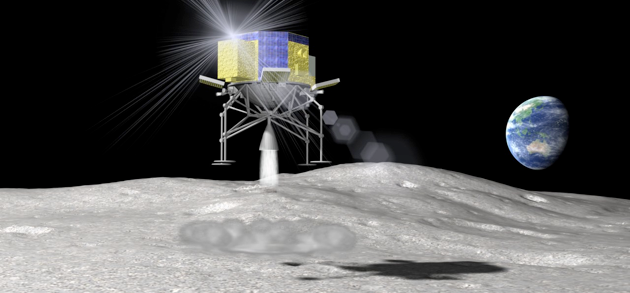
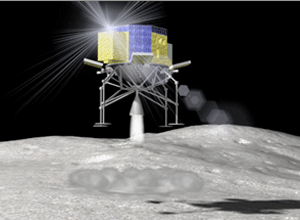
Tipover Risk Analysis for Lunar Landers
Tipover risk analysis and reduction for the SLIM lunar lander through pitch angle control, considering constraints unique to small spacecraft.
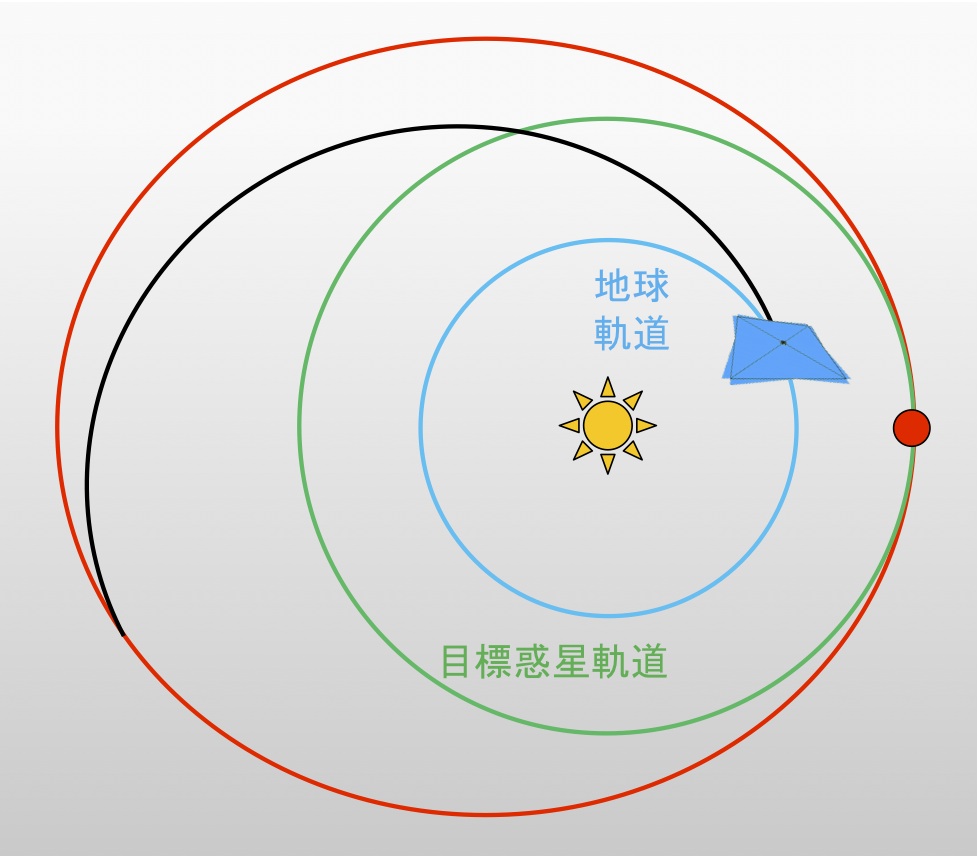
Solar Sail Trajectory Planning
Deriving trajectory planning methods for underactuated solar sail systems using nonlinear control theory.
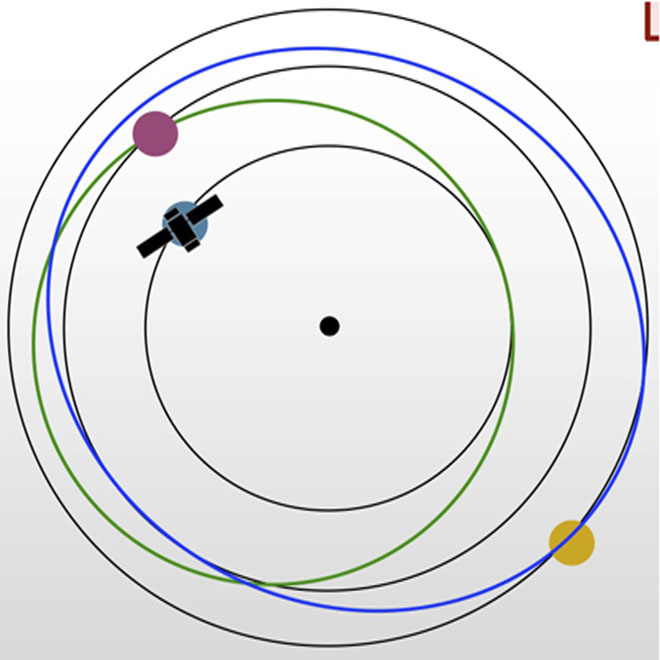
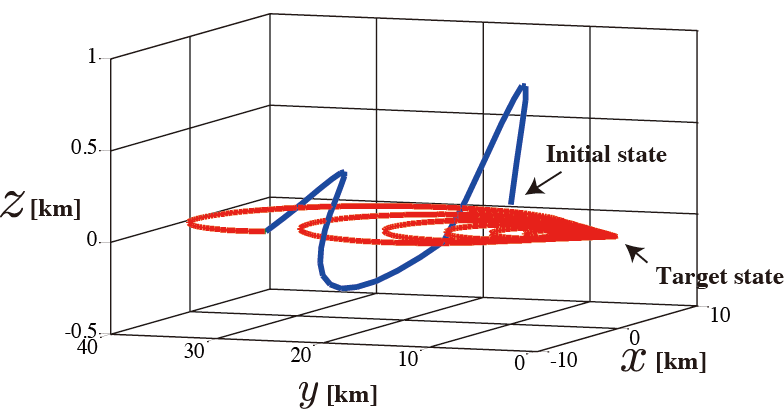
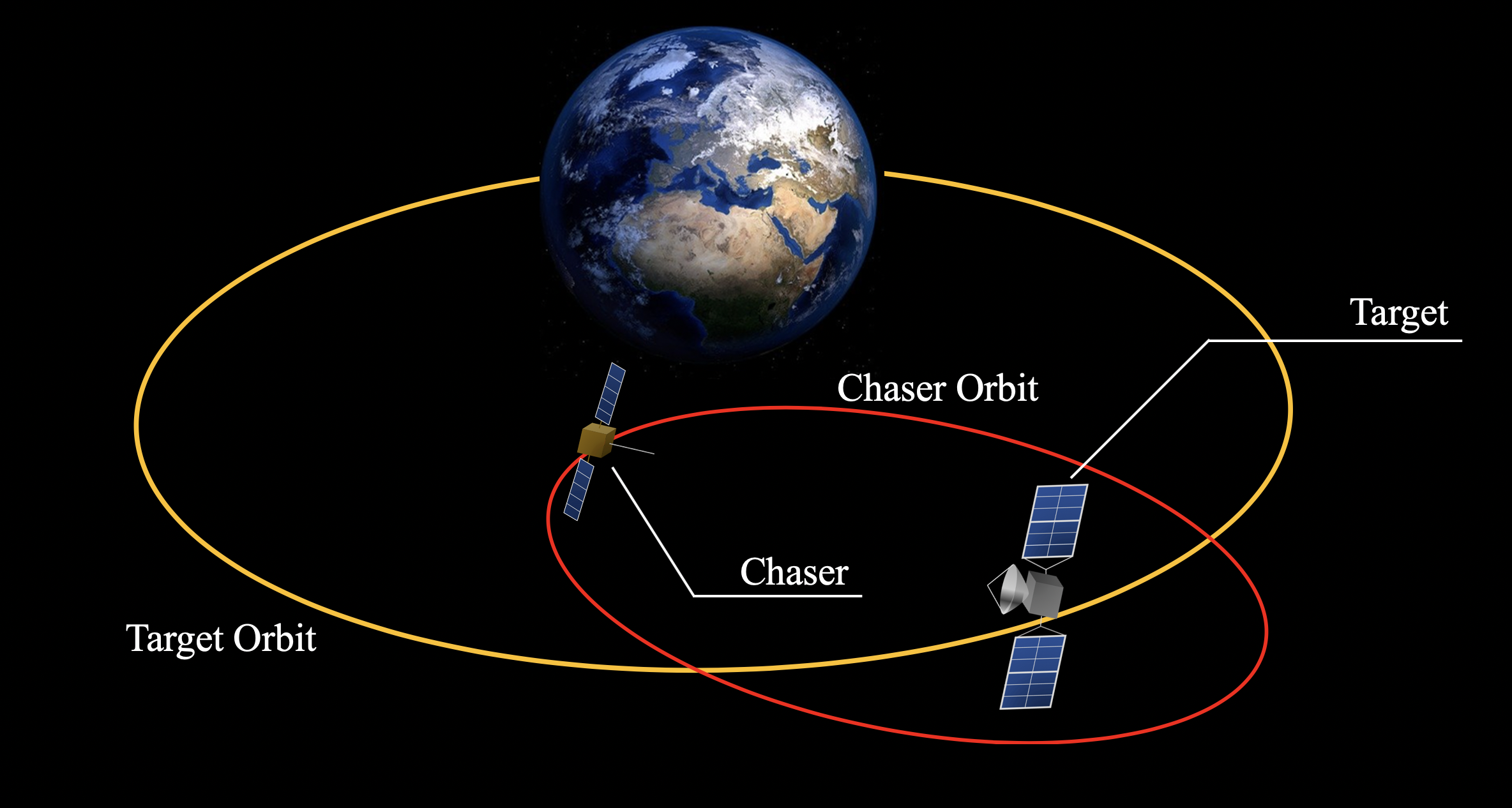
Rendezvous Trajectory Planning for Multiple Targets
Proposing trajectory planning methods for multiple-target rendezvous using the nonlinear Lambert problem, targeting space debris removal missions.
Dynamics & Control for Deep Space
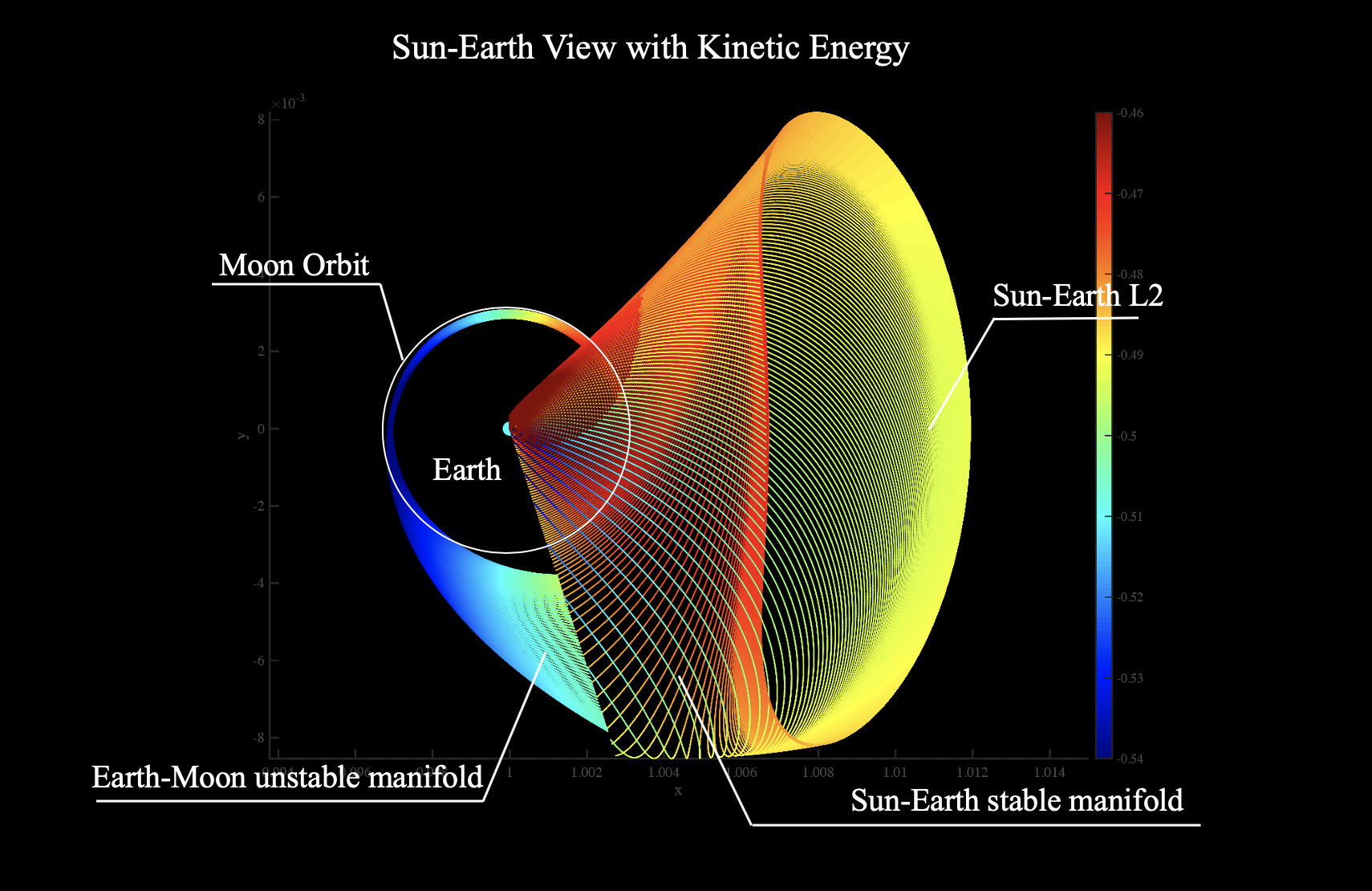
Interplanetary Trajectory Design via Multi-Body Dynamics
Efficiently designing low-energy interplanetary trajectories using geometric features such as invariant manifolds in the circular restricted three-body problem.
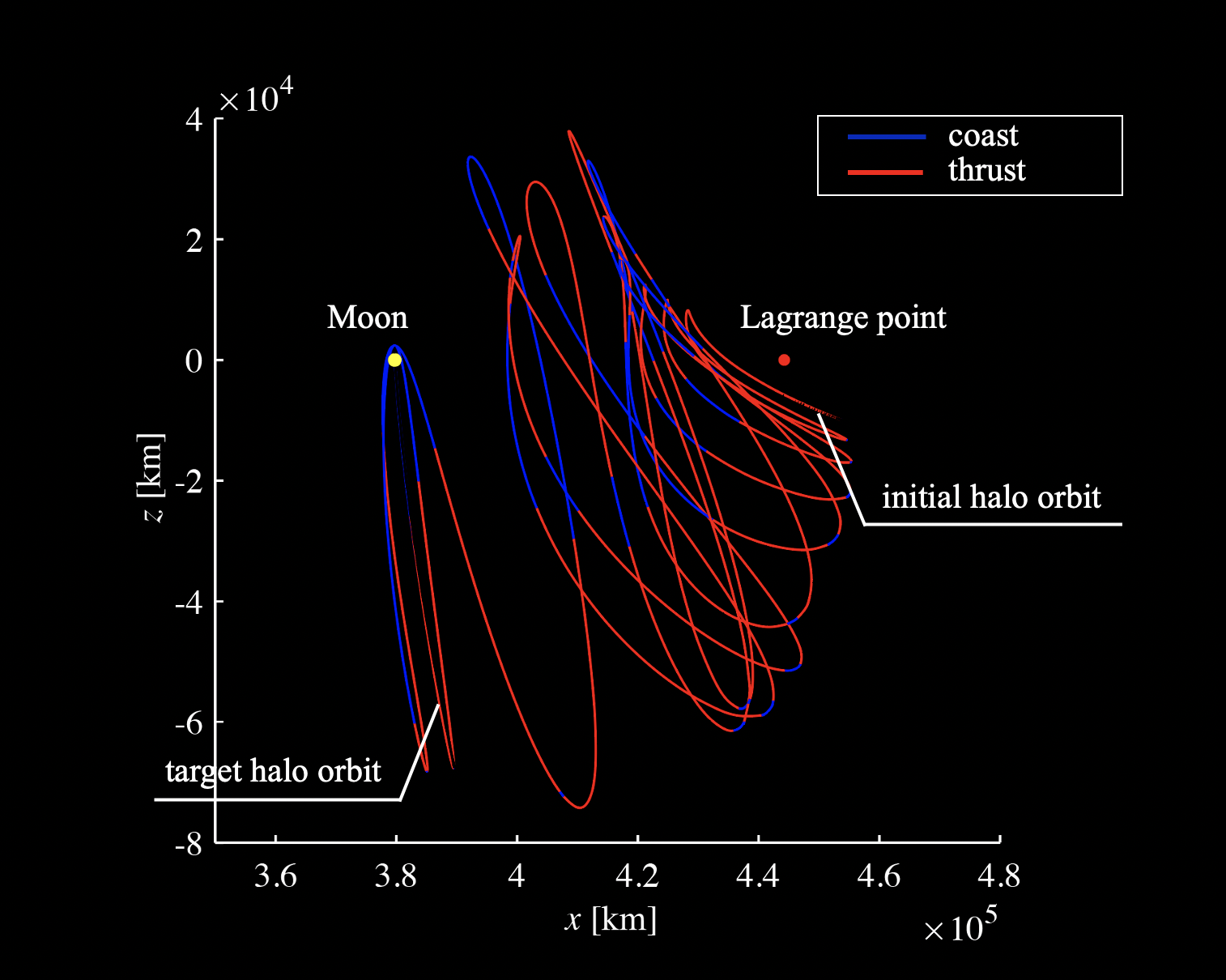
Low-Thrust Trajectory Optimization
Optimizing low-thrust trajectories for ion engines using sparse optimal control and Riemannian manifolds at low computational cost.
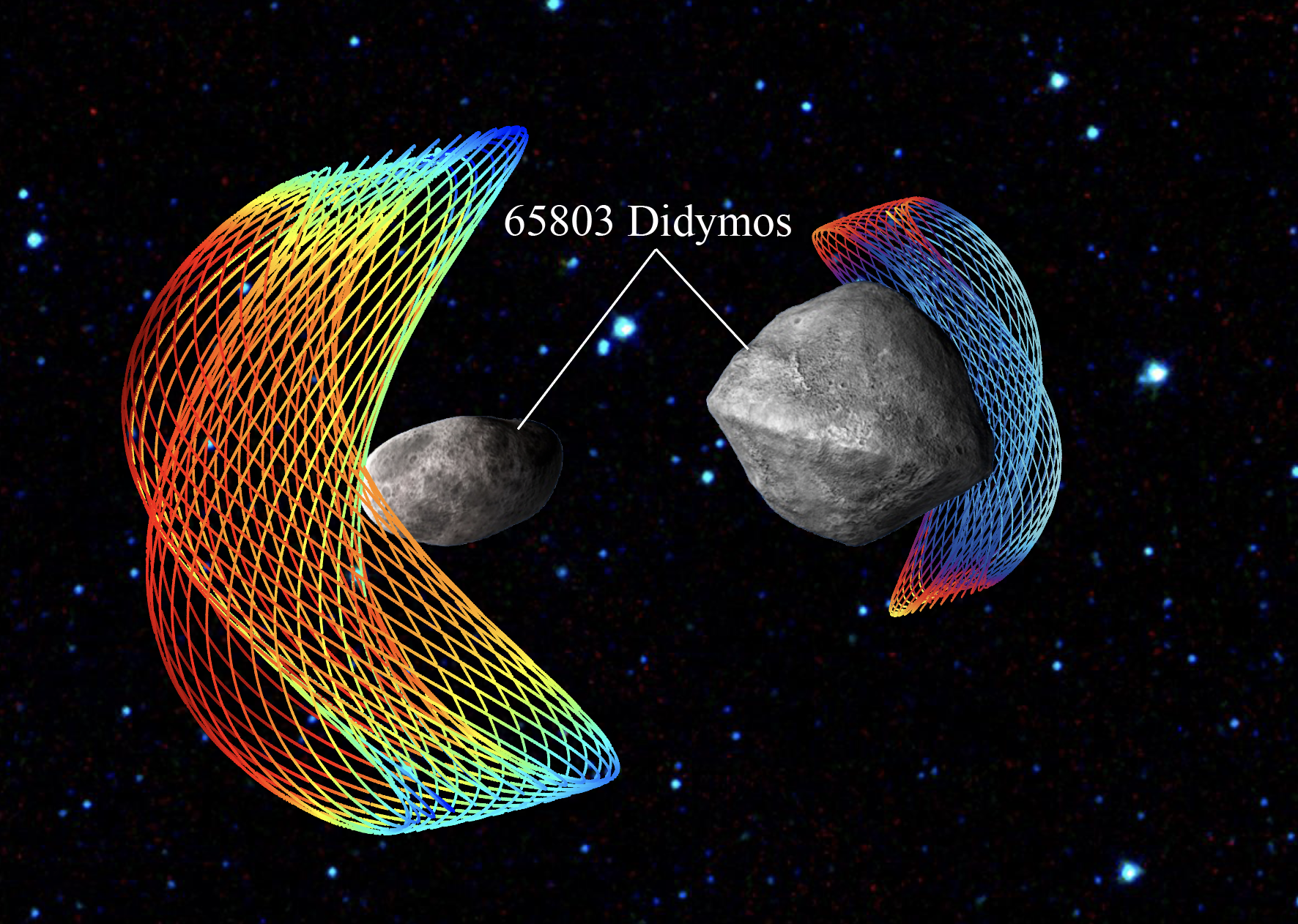
Trajectory Analysis for Asteroid Missions
Developing trajectory computation methods around irregularly shaped asteroids and researching fuel-efficient landing paths.
Formation Flying Orbit Control
Building control laws for maintaining Earth-orbiting formations using atmospheric drag as a control force while considering attitude constraints.
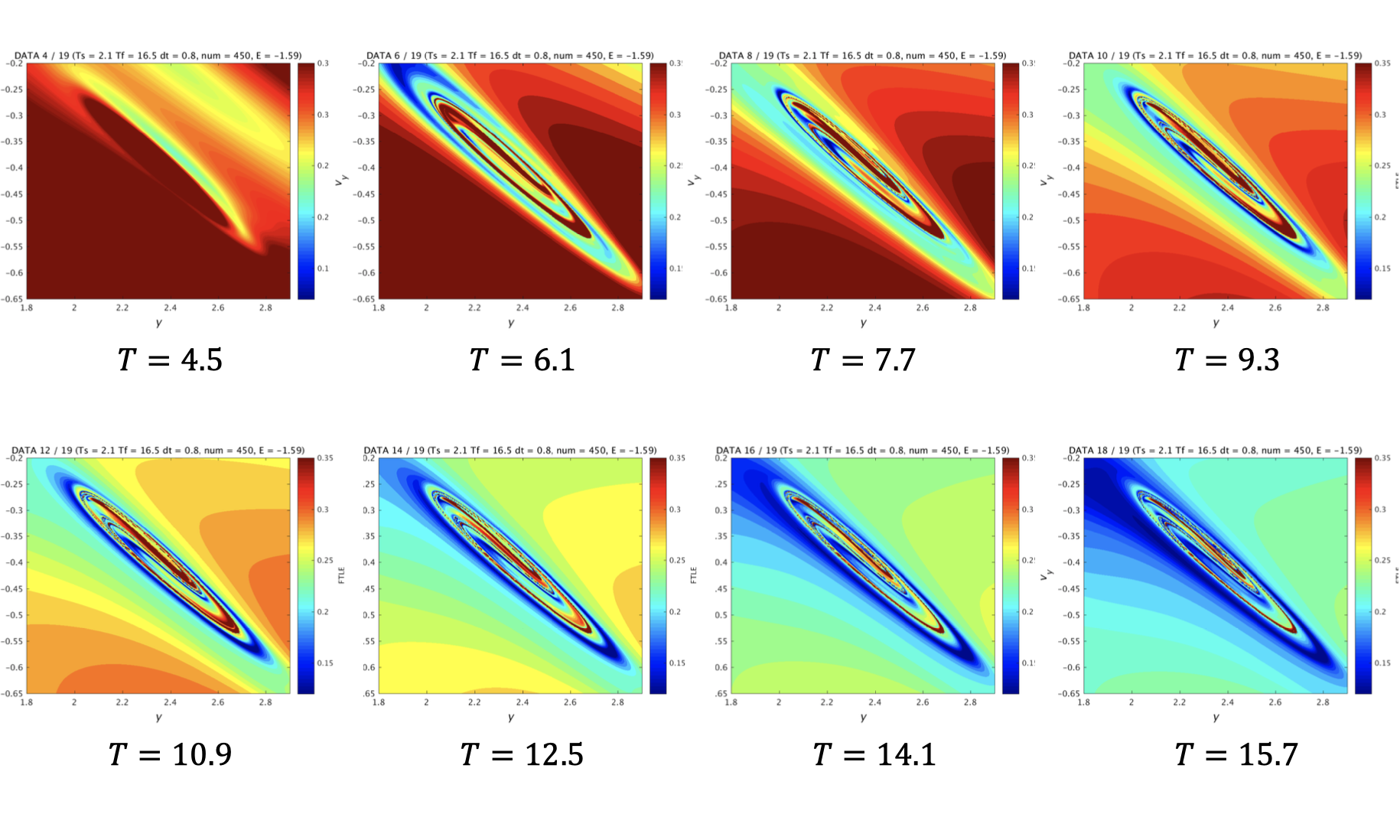
Data-Driven Approach to Nonlinear Dynamics
Analyzing multi-body dynamical systems from time-series data using Dynamic Mode Decomposition and Koopman operator theory.
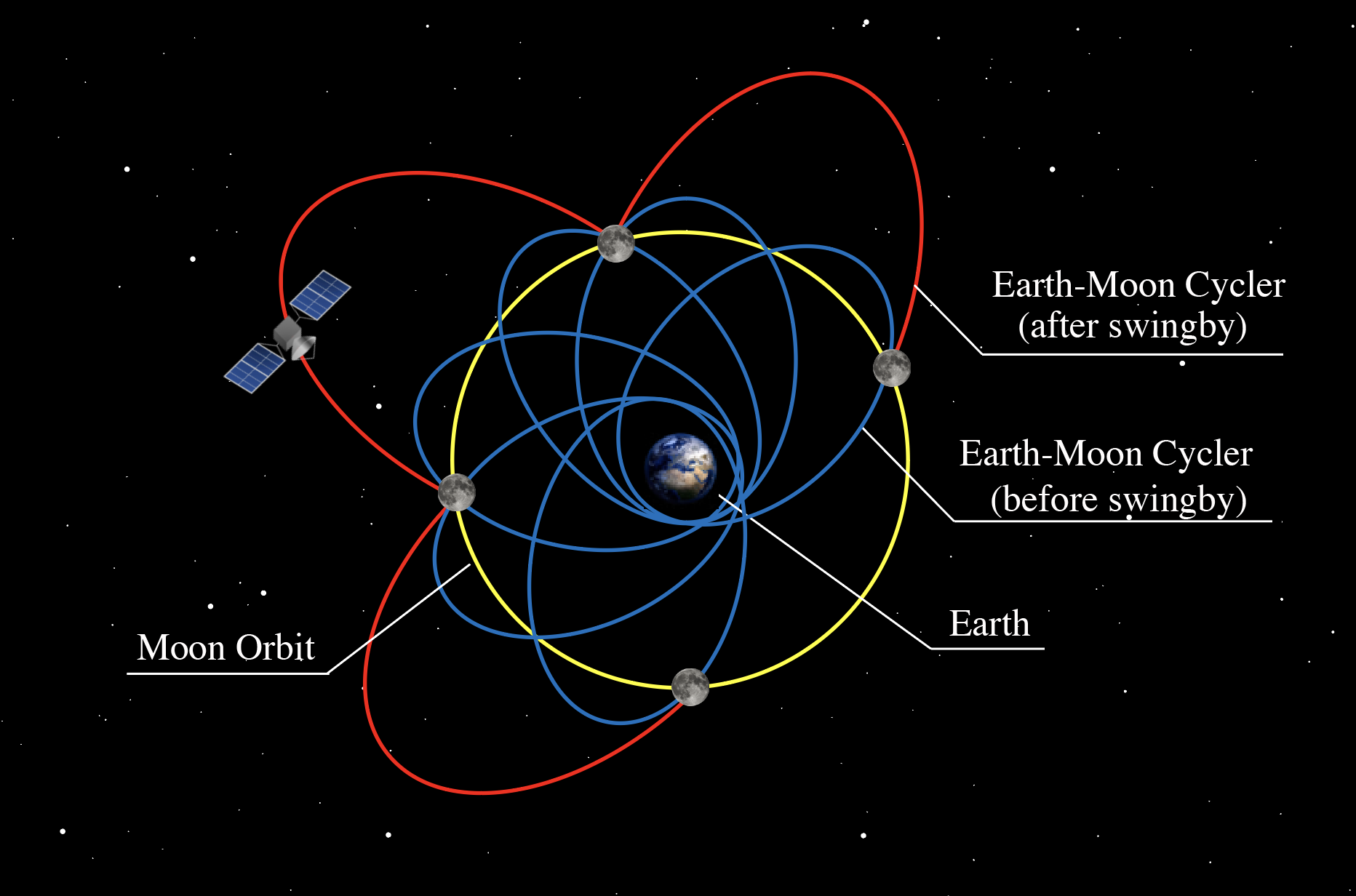
Earth-Moon Cycler Transportation System
Designing a transportation system using cycler orbits that repeatedly travel between Earth and Moon, combining multi-body dynamics and optimal control.
Past Research
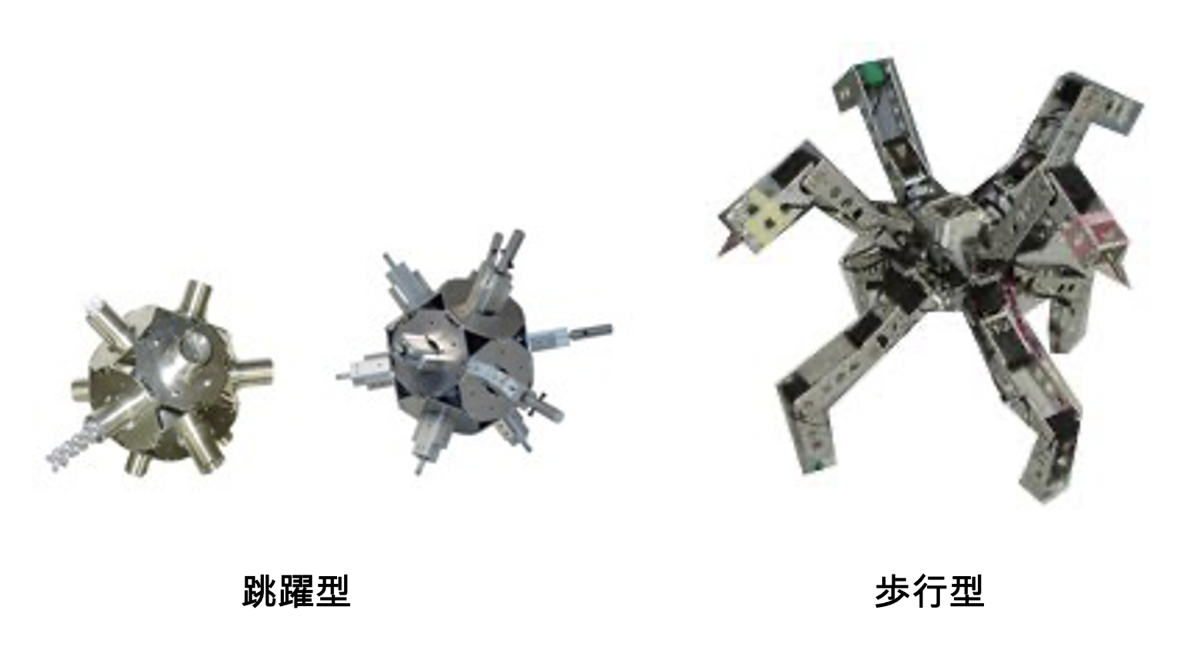
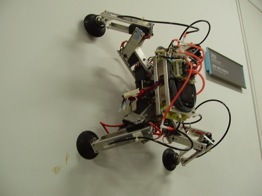
Planetary Exploration Rover R&D
Development of autonomous rover systems for sample collection and analysis on the Moon and planets, pursuing high reliability in structure, sensing, and control.
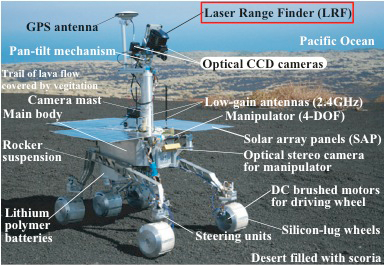
Autonomous Rover Navigation by LRF
Achieving autonomous planetary exploration through low-cost 3D environment recognition using laser range finders.

Autonomous Flight of Quadcopter
Verifying autonomous flight of quadcopters through rotor speed control using both simulation and hardware experiments.
Self-Localization via Translation/Rotation Camera
Improving environment recognition accuracy for small rovers by overcoming baseline length limitations using a translation/rotation camera mechanism.
Wall-Walking Robot
R&D of a compact robot capable of walking on vertical walls and ceilings using suction cups and pump-generated negative pressure.