Autonomous System
Obstacle Shape Detection using Wide-Field Integration of Optical Flow
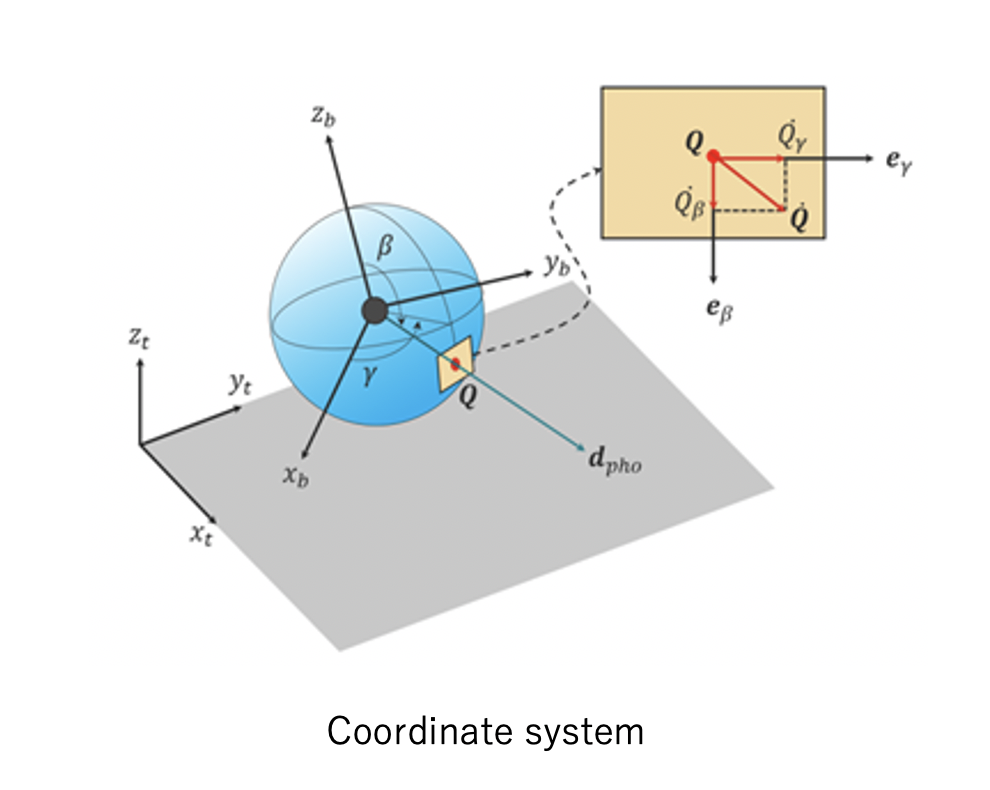
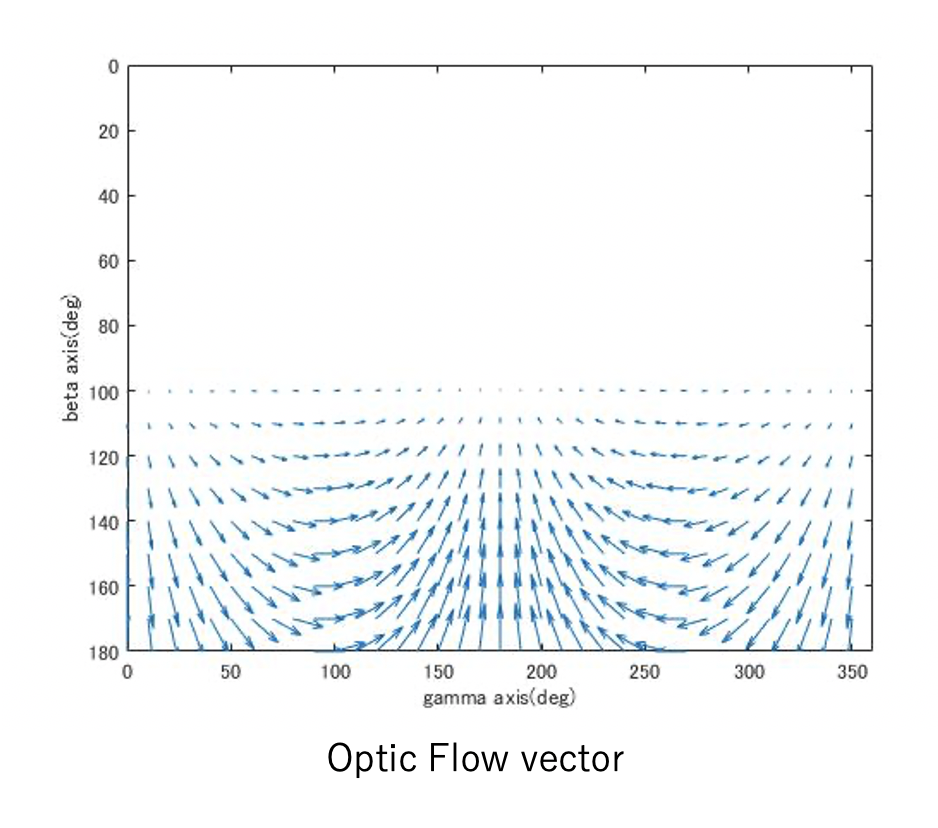
Optic flow is a kind of projection vector of motion on a camera screen, which is affected by parameters such as velocity and distance to external points. Therefore, distances from a UAV to points on an obstacle can be determined based on optical flow.
Wide-Field Integration (WFI), inspired by the compound eyes of insects such as flies, gathers information from a wide field containing numerous points and processes it comprehensively to reduce noise impact and improve state estimation accuracy.
In this research, we aim to estimate distances to all points on an obstacle and reconstruct its shape using WFI of Optic Flow. To achieve accurate distance and shape estimation, we focus on:
- Applying WFI of optical flow to obstacles with unknown shapes
- Reducing the influence of noise
- Handling singularity points
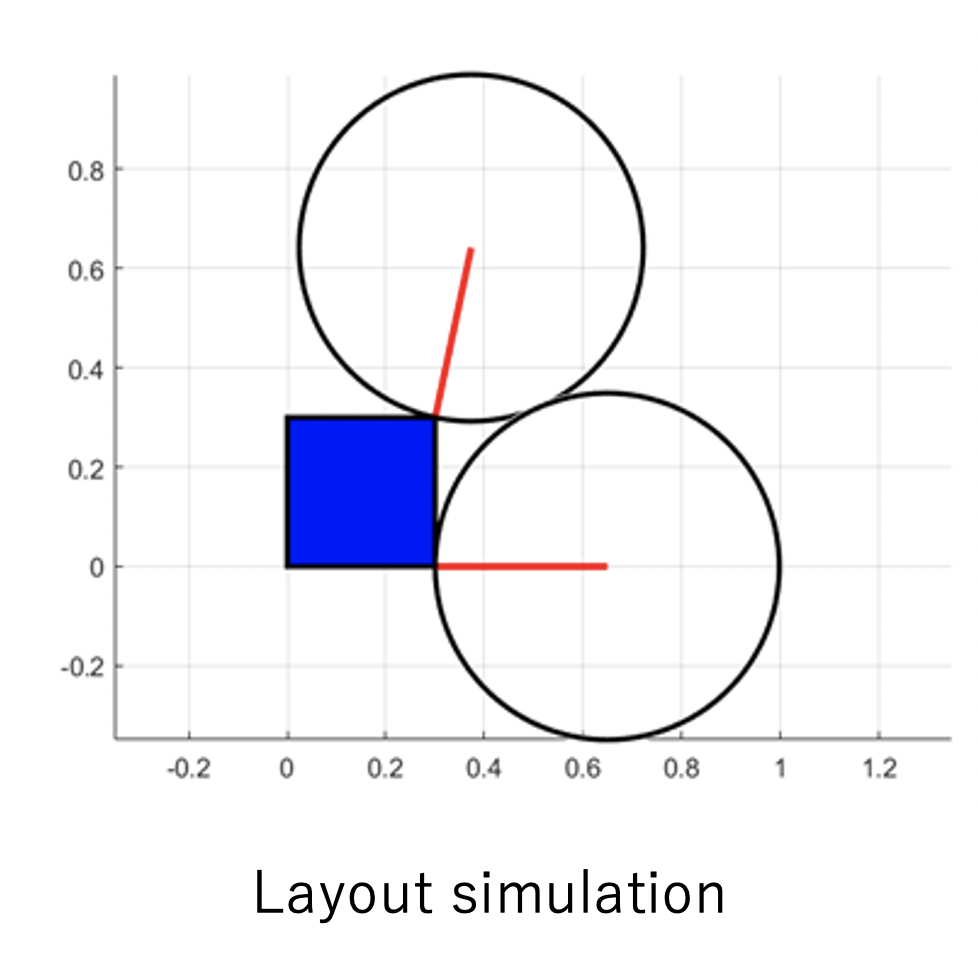
Research on Optimal Layout of Tilt-Rotor Aircraft
A tilt-rotor aircraft is a new concept combining helicopter and fixed-wing aircraft capabilities. It can take off and land vertically without a runway, while also achieving high-speed, long-distance flight comparable to fixed-wing aircraft, thus expanding the operational flight range.
However, there is no global consensus on tilt-rotor layout design. Questions regarding the number of rotors, rotor size, and rotor placement remain unresolved.
This research aims to find optimal flight layouts for tilt-rotor aircraft using particle swarm optimization algorithms, Dynamic Manipulability Measure (DMM), Blade Element-Momentum Theory, and other related theories across different takeoff weights. We also investigate the challenging transition process between hover and forward flight modes.

Spacecraft State Estimation from Camera Images
This research focuses on spacecraft state estimation using the Wide-Field Integration of Optic Flow (WFI) method. Optic flow represents the motion of objects in video as vector information. In this research, video is captured by a camera mounted on the spacecraft. WFI, inspired by the compound eyes of insects such as flies, integrates information from a wide area to estimate the spacecraft’s own state. Our laboratory extends conventional WFI to estimate attitude angles, which were not estimated in previous approaches.