Past Research
Research & Development on Planetary Exploration Rover
One of the methods for lunar and planetary exploration is to use robots (rovers) that collect and analyze samples on the actual celestial body. The environment on celestial bodies such as the Moon and Mars is almost entirely unknown, including surface terrain and underground cave conditions. Furthermore, rovers operating far from Earth require autonomous capabilities for efficient exploration.
Our laboratory aims to develop highly reliable rover systems capable of autonomous and efficient exploration in unknown environments, addressing structural design (locomotion methods), sensing, and control.
For more details, see here.
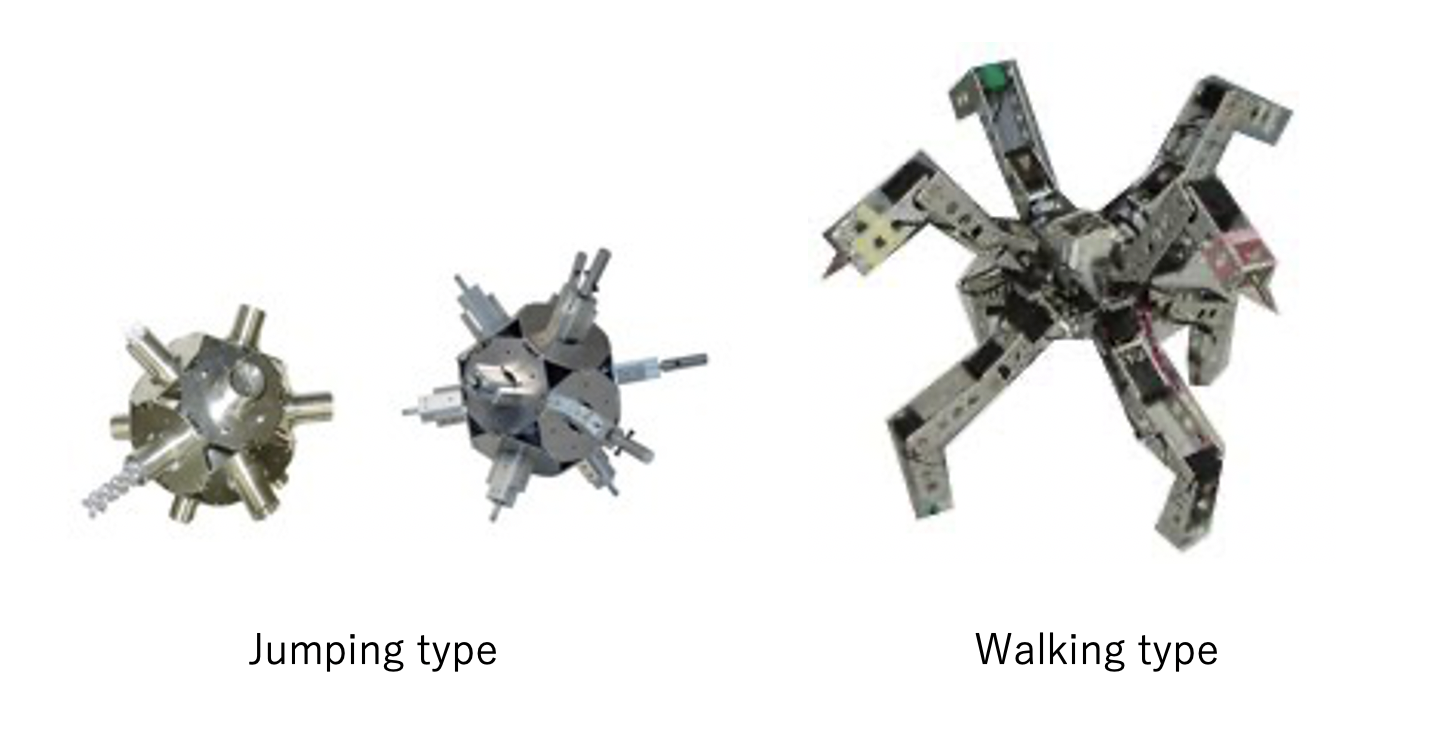
In our laboratory, we study control using neural oscillators for building autonomous systems. By utilizing bio-inspired networks, we aim to achieve autonomous locomotion with high energy efficiency.
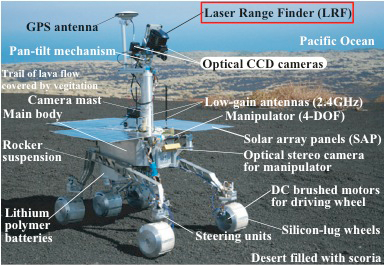
Autonomous Rover Navigation by Laser Range Finder (LRF)
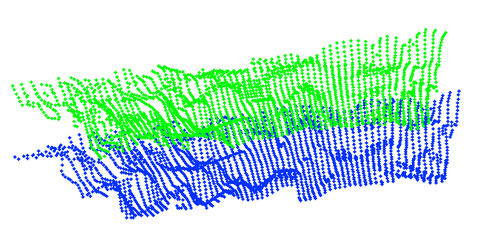
This research aims to improve the efficiency of planetary exploration activities. An LRF estimates distance by measuring the time a laser beam takes to reflect from an object. By rotating the LRF horizontally and varying the vertical angle, three-dimensional terrain data can be obtained.
Conventional exploration rovers use cameras for environment recognition, but the computational load is high and cannot be processed onboard. This necessitates communication with ground stations, reducing exploration efficiency on other planets. The LRF-based method has lower computational cost and enables onboard processing. While cameras can infer slip and stuck risks from color and texture information, LRF requires detecting these through travel distance estimation. We are currently verifying this accuracy.
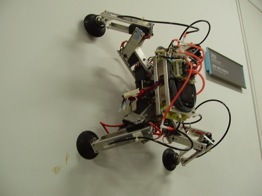
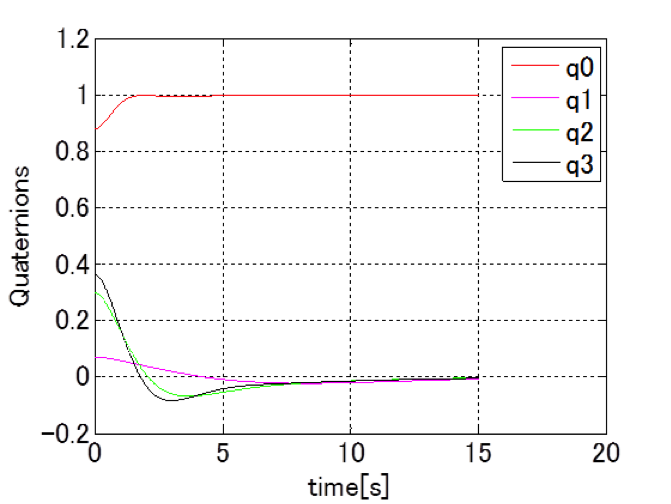
Autonomous Flight of Quadcopter
This research investigates autonomous flight of a quad-rotor helicopter (quadcopter). The rotors are mounted at the four ends of an X-shaped frame, all generating thrust in the same direction. This type of helicopter can move vertically and horizontally by varying the rotation speed of its four propellers. We conduct both numerical simulations and hardware experiments to achieve autonomous flight of the quadcopter.

Self-Localization of Exploration Rover using Translation/Rotation Camera
Stereo vision is a common method for recognizing the surrounding environment using camera images. However, small rovers have limited baseline length due to size constraints, which limits estimation accuracy. By using a camera with a translation and rotation mechanism, we aim to improve environmental recognition accuracy without moving the rover itself.
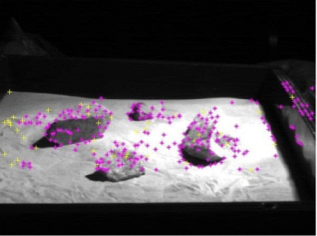
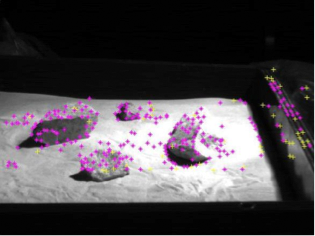
Example of Feature Point Extraction from Stereo Images
Wall-Walking Robot
We are developing a compact walking robot capable of freely traversing vertical walls and ceilings.
By using suction cups and pumps on its feet to generate negative pressure, the robot achieves wall-walking capability.