Position/Attitude Control of Underactuated Spacecraft
Underactuated Attitude Control Simulation
This research addresses underactuated systems, also known as nonholonomic systems.
Conventionally, attitude and angular velocity control of underactuated spacecraft has been performed using torques about two axes.
In contrast, this research aims to achieve simultaneous control of both position and attitude by using thrusters.
Due to the mechanical characteristics of thrusters, the system has not only underactuation but also unidirectional and constant-value input constraints, resulting in a constrained-input system.
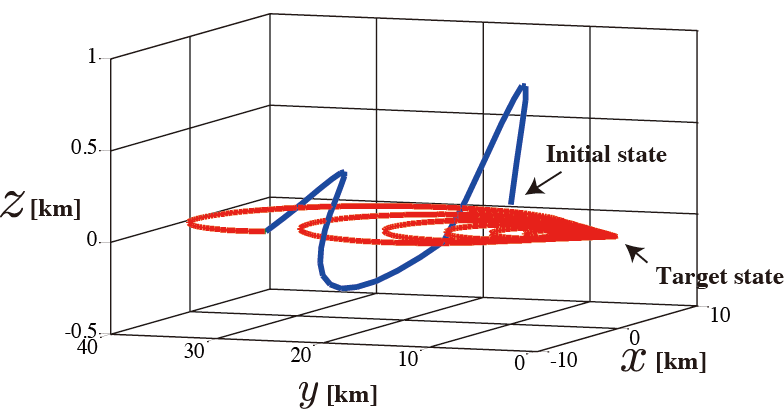
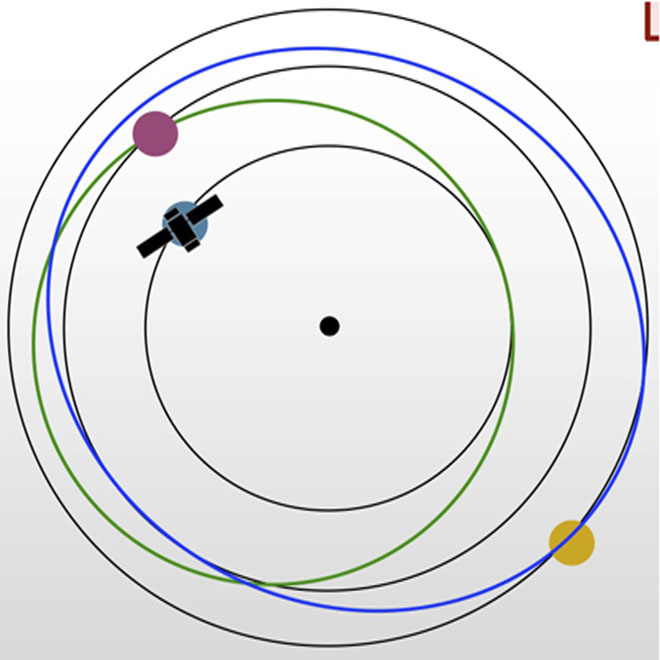
Formation Flight Trajectory Control with Minimal Thrusters
Rendezvous Trajectory
Conventional satellites employ sub-thrusters, reaction wheels (RW), and control moment gyros (CMG) for attitude control, along with main thrusters for orbit control.
This research investigates methods to control both attitude and orbit using only four thrusters.
This approach is also considered useful as a fault-tolerant control scheme in the event of actuator failure.
Satellite Attitude Control via Sliding Mode
Attitude stabilization and control is one of the important problems in satellite design. More recently, many researchers have designed rigorous controllers for satellite orientation. Indeed, the success of a space mission often depends on the precision of the satellite’s attitude control in spite of the presence of environmental disturbances, as well as large parameter uncertainties including interaction with flexible appendages such as robot manipulators. Moreover, space vehicles are complex systems with high nonlinearity. Sliding mode control (SMC) has been recognized as a robust control technique for satellite attitude maneuvers, due to its inherent advantages of stabilizing the system, disturbance rejection and low sensitivity to plant parameter variations.
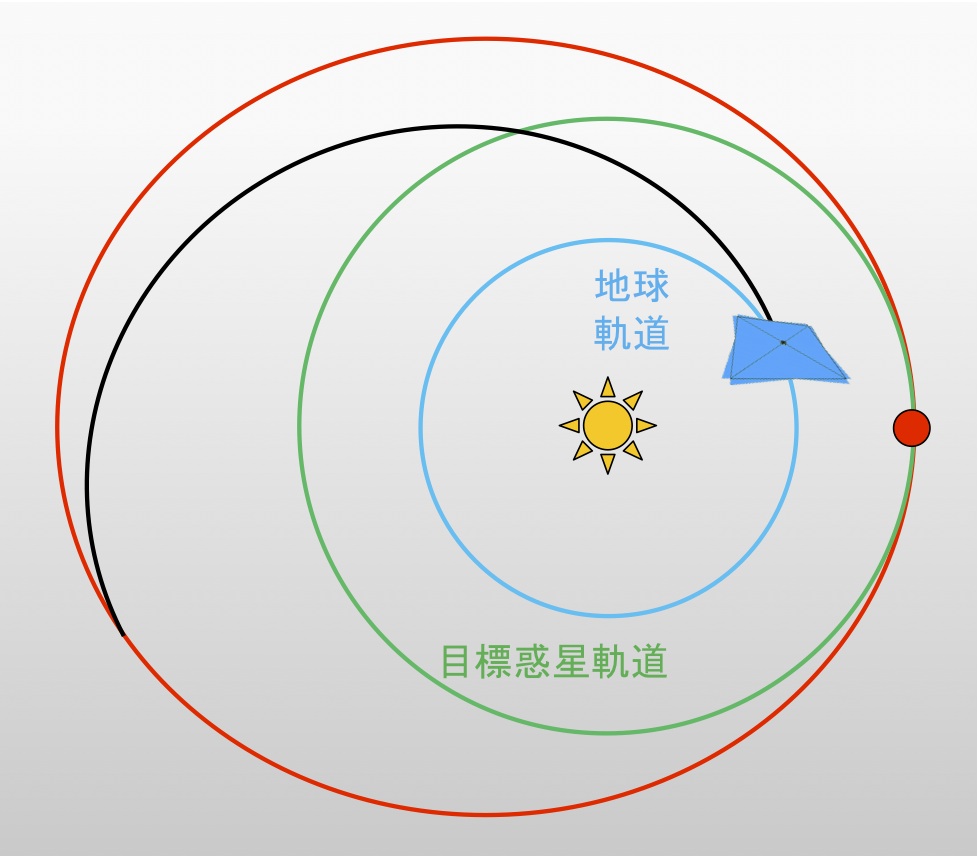
Solar Sail Trajectory Design
A solar sail is a spacecraft that deploys a large sail in space, receiving sunlight and using its radiation pressure as propulsion.
In trajectory design, conventional spacecraft can freely set both the direction and magnitude of thrust as independent inputs. However, for solar sails, the thrust direction and magnitude cannot be chosen independently, resulting in an underactuated system with fewer degrees of freedom, which makes the design problem more challenging.
Conventionally, methods relying on iterative numerical computation have been studied. Our laboratory aims to derive trajectory design methods that avoid iterative numerical computation by applying nonlinear control theory.
Rendezvous Trajectory Design for Multiple Targets
Rendezvous Trajectory Design
This research investigates how to plan trajectories for rendezvous missions to multiple targets, such as space debris removal.
Instead of the commonly used CW (Clohessy-Wiltshire) solution, we aim to propose trajectory design methods based on the nonlinear Lambert problem for describing rendezvous maneuvers.