自律システム

衛星の軌道・姿勢制御
劣駆動衛星の位置・姿勢制御
スラスターを用いた劣駆動衛星の位置と姿勢の同時制御。入力の一方向・一定値制約も考慮。
少数スラスターによるフォーメーションフライト
わずか4機のスラスターで姿勢と軌道の両方を制御する手法。故障時の冗長系としても有用。
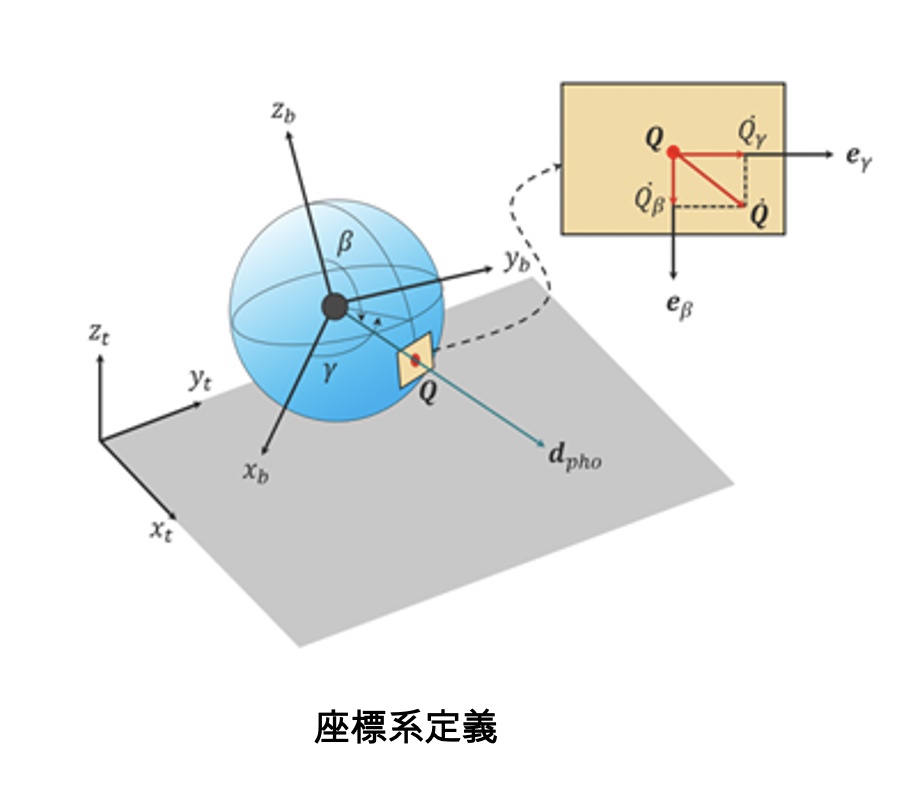
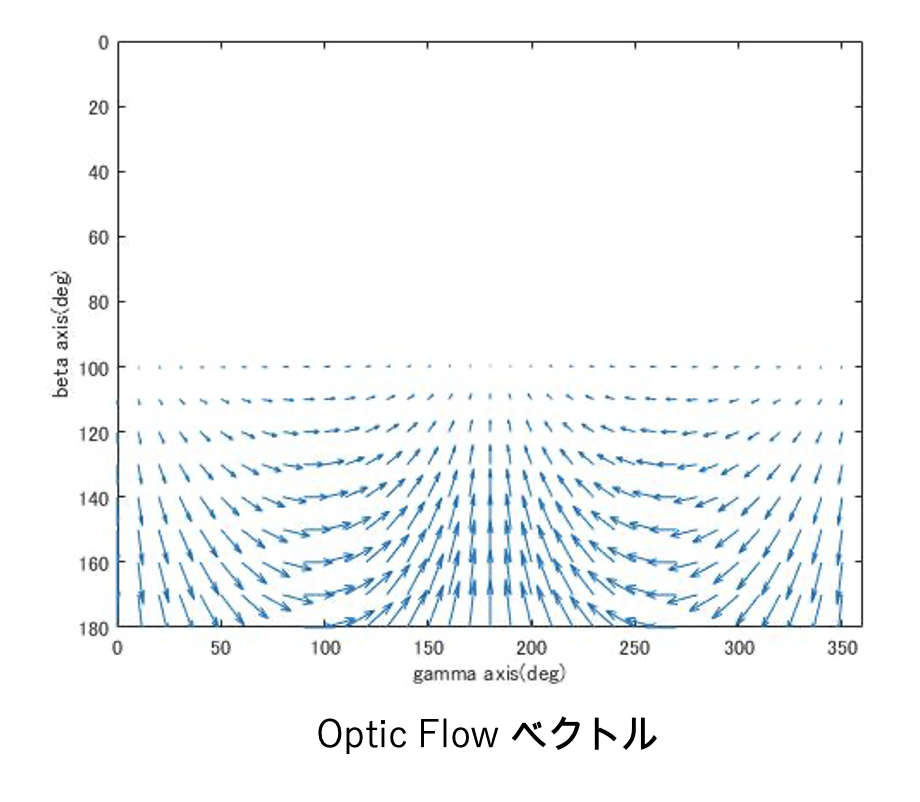
スライディングモードによる姿勢制御
スライディングモード制御により、外乱やパラメータ不確かさに対してロバストな衛星姿勢制御を実現。
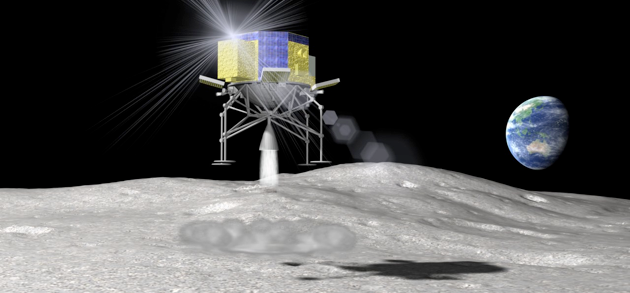
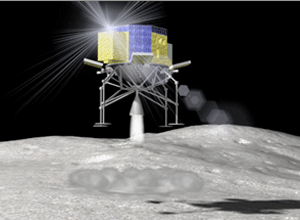
月面着陸機の転倒リスク解析
SLIM月面着陸時のピッチ角制御による転倒リスク解析・低減。小型探査機特有の制約を考慮。
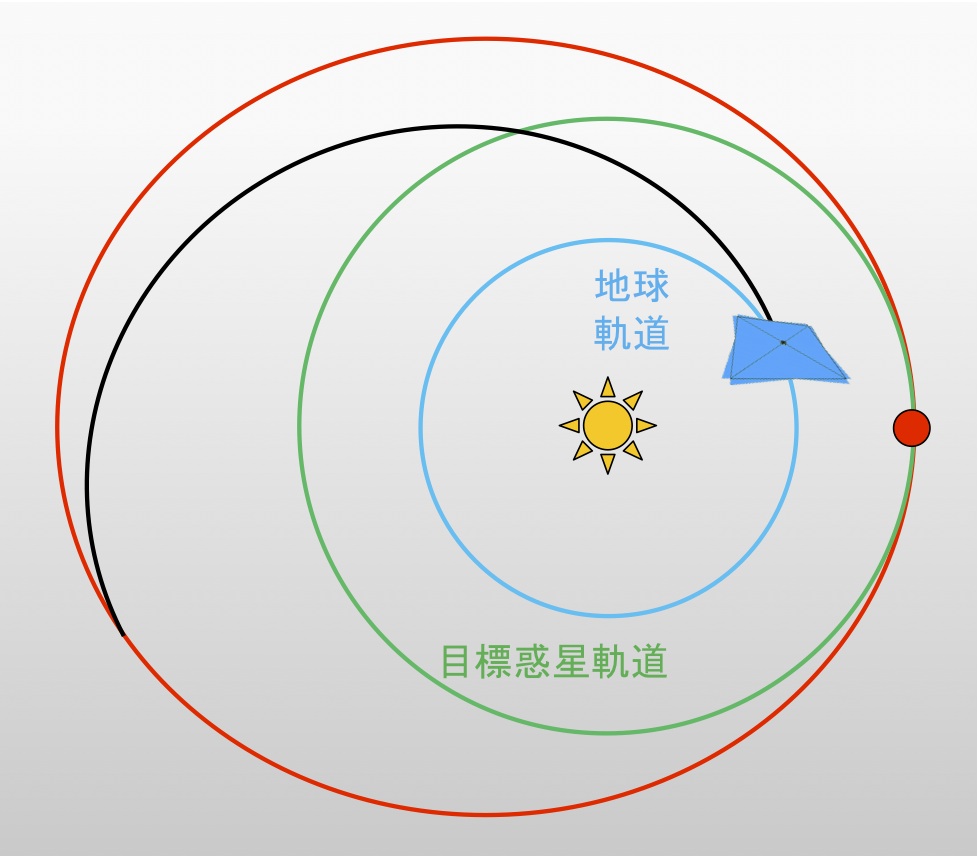
ソーラーセイルの軌道計画
太陽光の反発力を推進力とする劣駆動システムに対し、非線形制御理論による軌道計画法を導出。
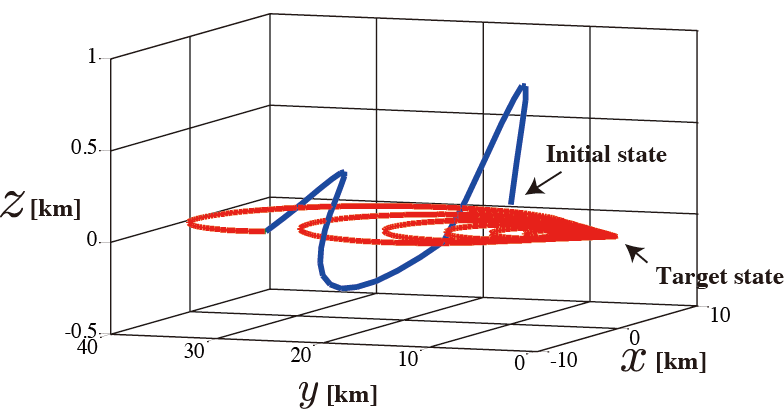
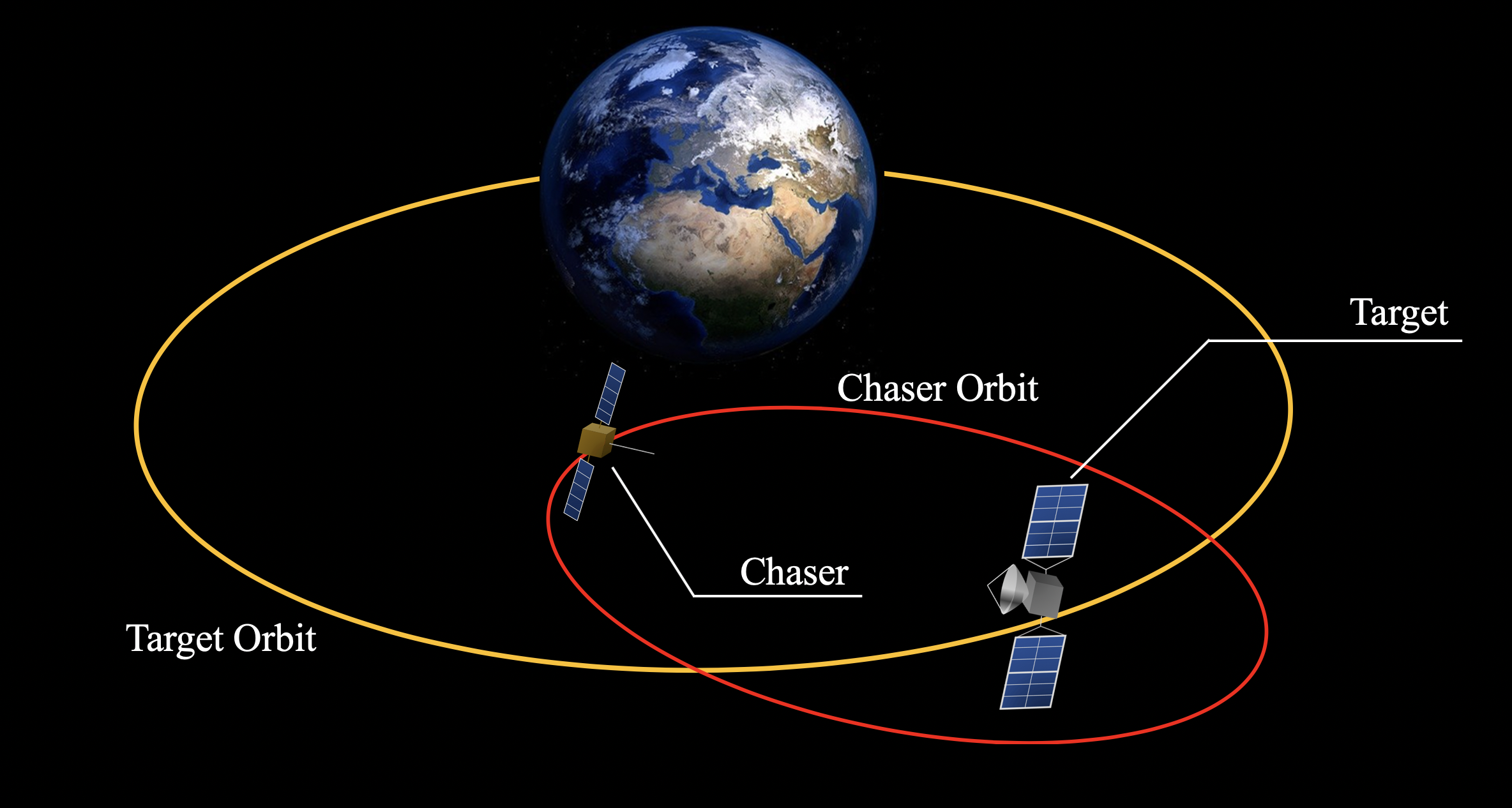
複数ターゲットへのランデブー軌道計画
スペースデブリ除去等を想定し、非線形Lambert問題を用いた複数ターゲットへの軌道計画手法を提案。
深宇宙探査機の力学と制御
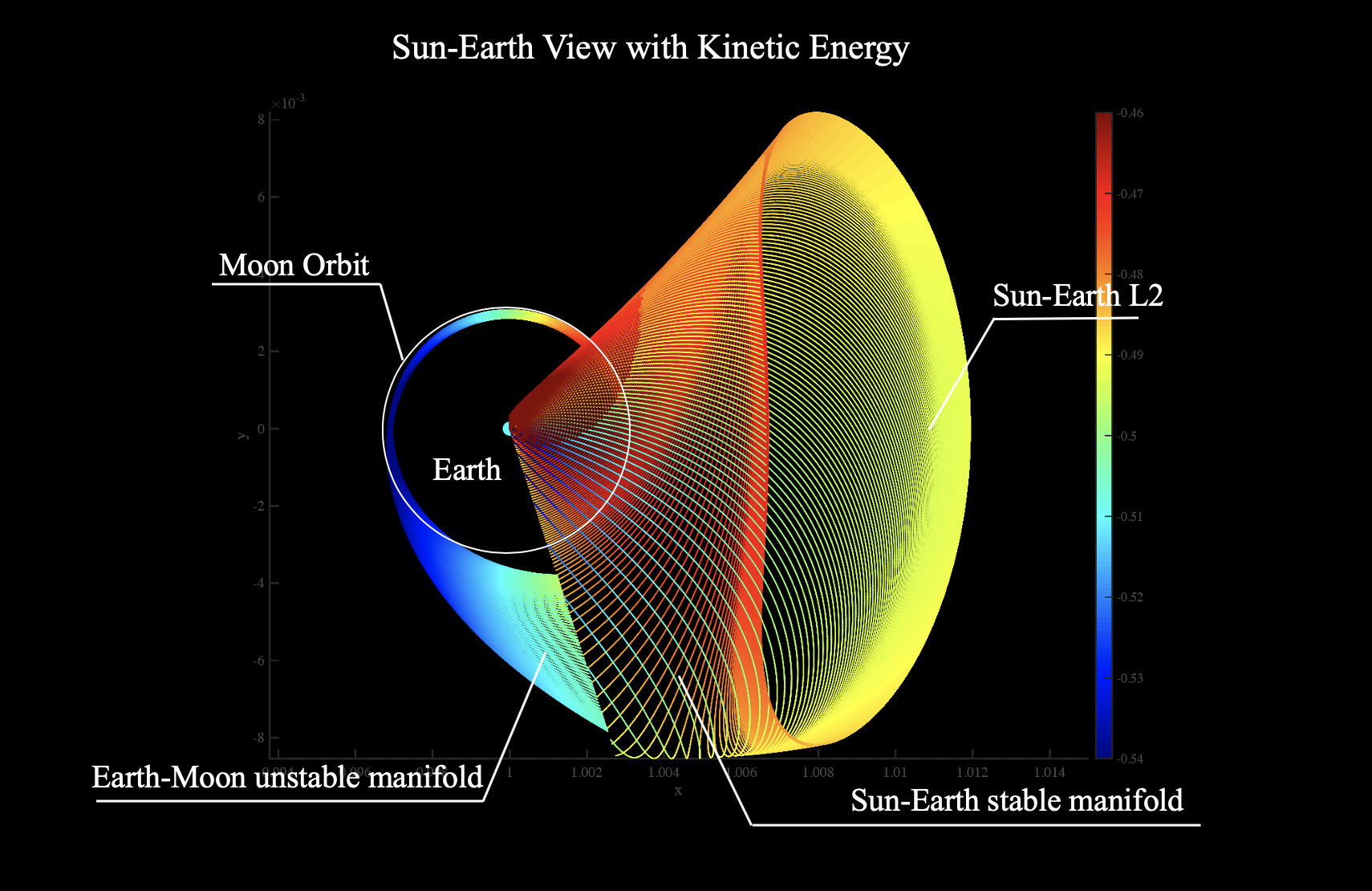
多体力学系を利用した惑星間軌道設計
円制限三体問題の不変多様体等の幾何学的特徴を利用し、低エネルギーな惑星間軌道を効率的に設計。
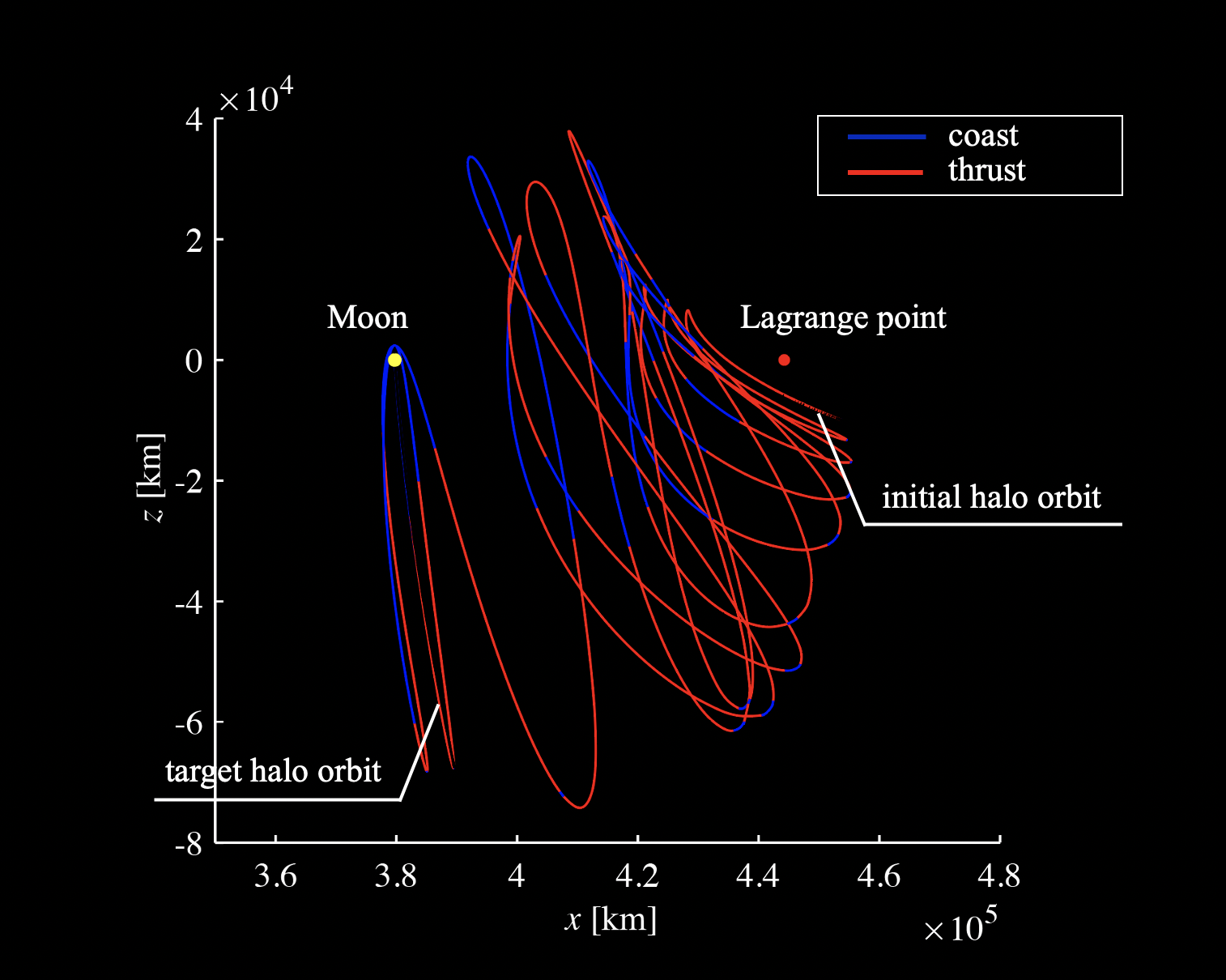
低推力推進を用いた軌道最適化
スパース最適制御やリーマン多様体を活用し、イオンエンジン等の低推力軌道を低計算コストで最適化。
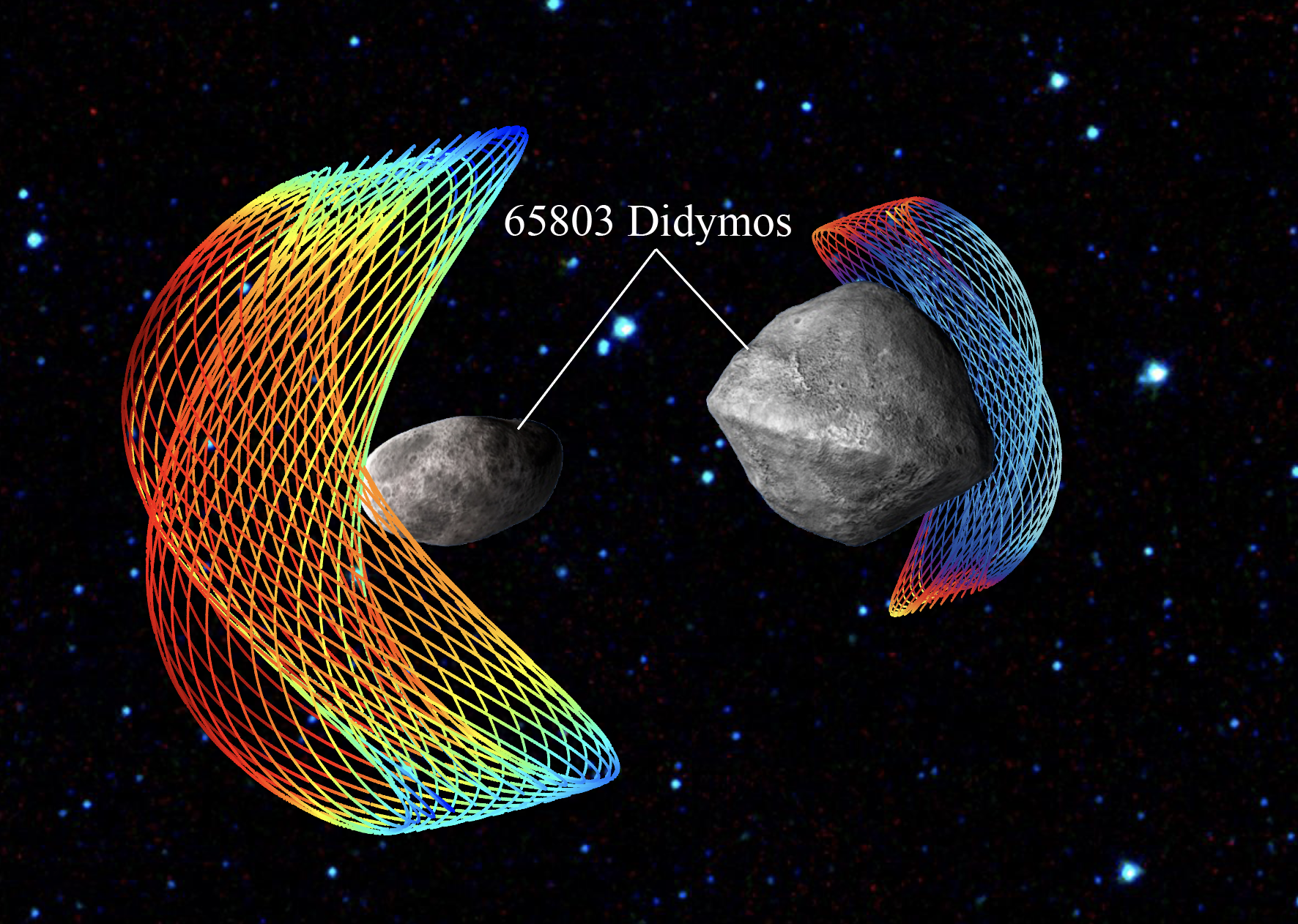
小惑星探査ミッションのための軌道解析
歪な重力場を持つ小惑星周りでの軌道計算手法の開発と、少燃料着陸経路の研究。
フォーメーションフライトの軌道制御
大気抵抗を制御力として利用し、姿勢制約を考慮した地球周回フォーメーション維持の制御則を構築。
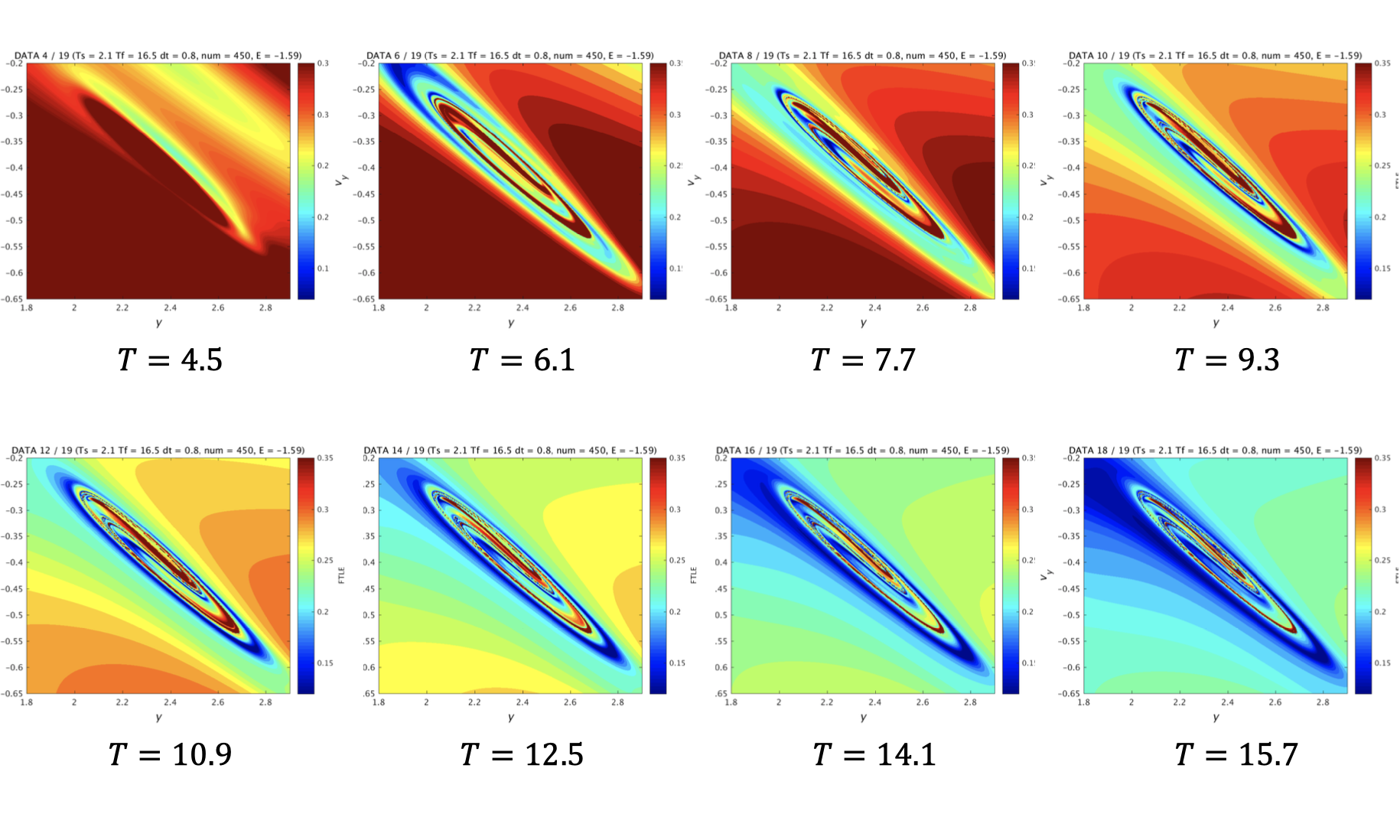
非線形力学系へのデータサイエンス的アプローチ
動的モード分解やクープマン作用素理論を用い、時系列データから多体力学系を解析。
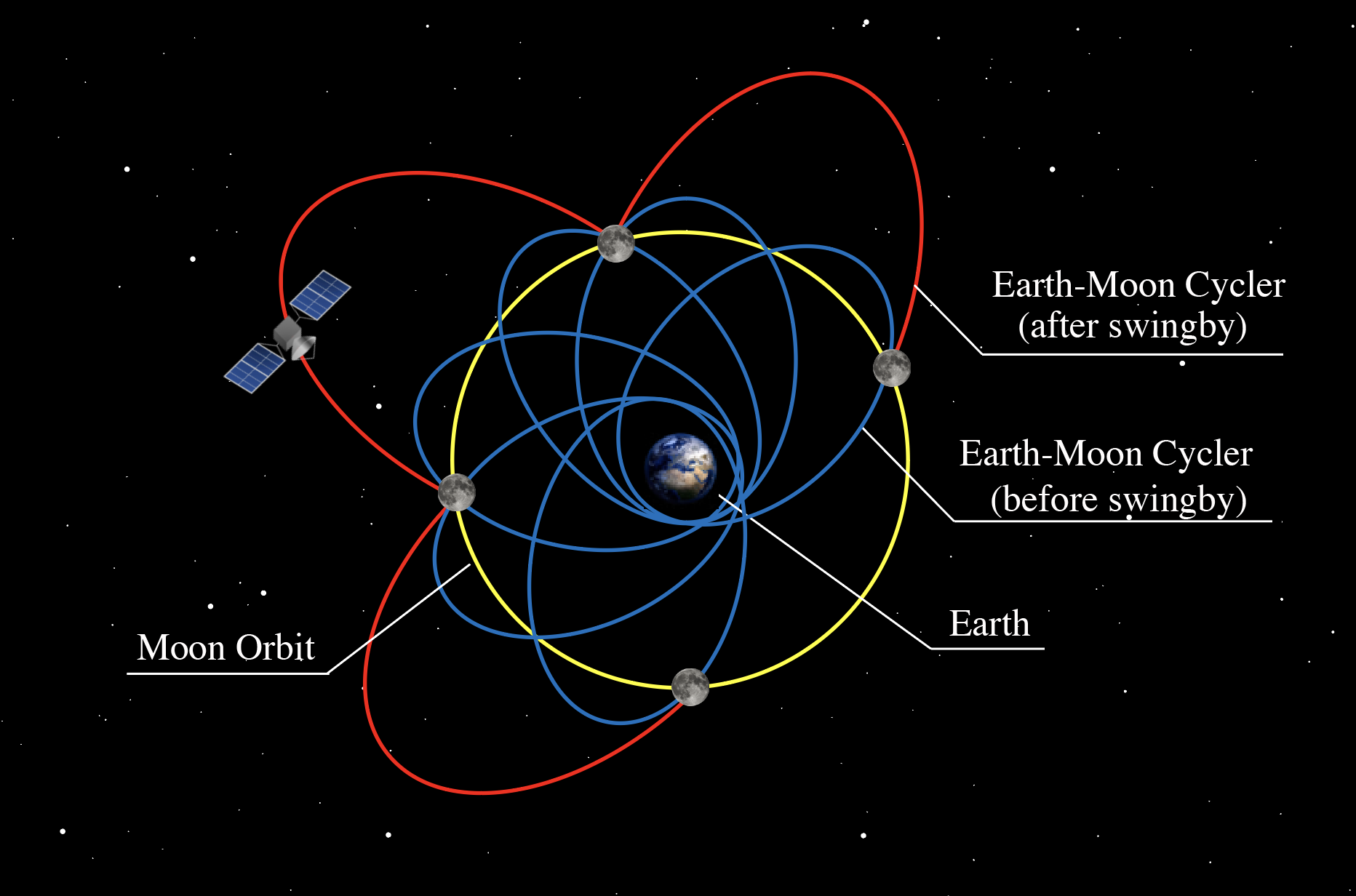
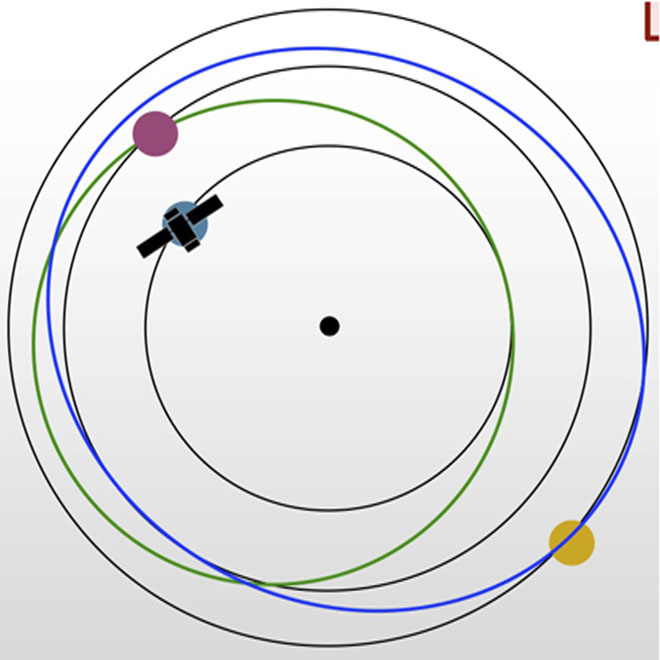
地球―月往還型輸送システム
多体問題と最適制御を組み合わせ、地球-月間を繰り返し往復するサイクラー軌道による輸送システムを設計。
過去の研究
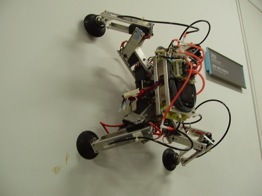
惑星探査ローバーの研究開発
月・惑星上で自律的にサンプル収集・分析を行うローバーシステムの開発。構造・センシング・制御の観点から高信頼性を追求。
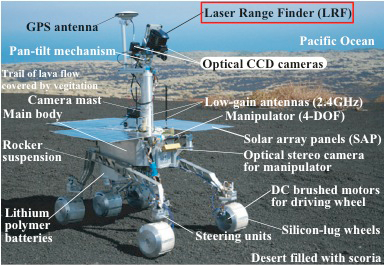
LRFによる探査ローバーの自律移動
レーザーレンジファインダーによる低計算コストの3次元環境認識で、ローバーの自律的な惑星探査を実現。

クアッドコプターの自律飛行
4つのプロペラの回転数制御によるクアッドコプターの自律飛行をシミュレーションと実機で検証。
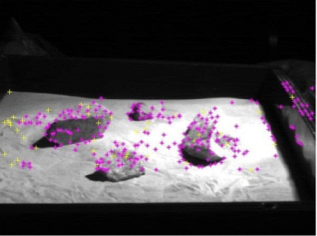
並進・回転カメラによる自己位置同定
並進・回転機構を持つカメラで、小型ローバーの基線長制限を克服し環境認識精度を向上。
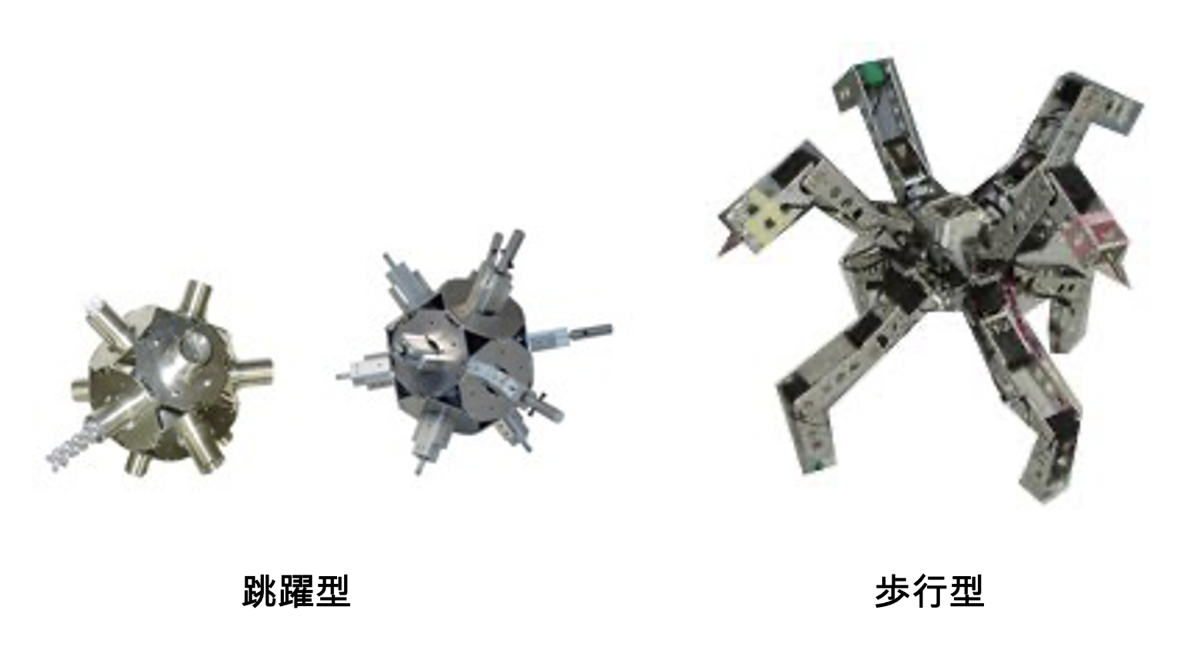
壁歩行ロボット
吸盤とポンプによる負圧で垂直な壁や天井を自由に歩行できる小型ロボットの研究開発。