自律システムの研究紹介
Wide-Field Integration of Optic Flow に基づく障害物形状検知研究
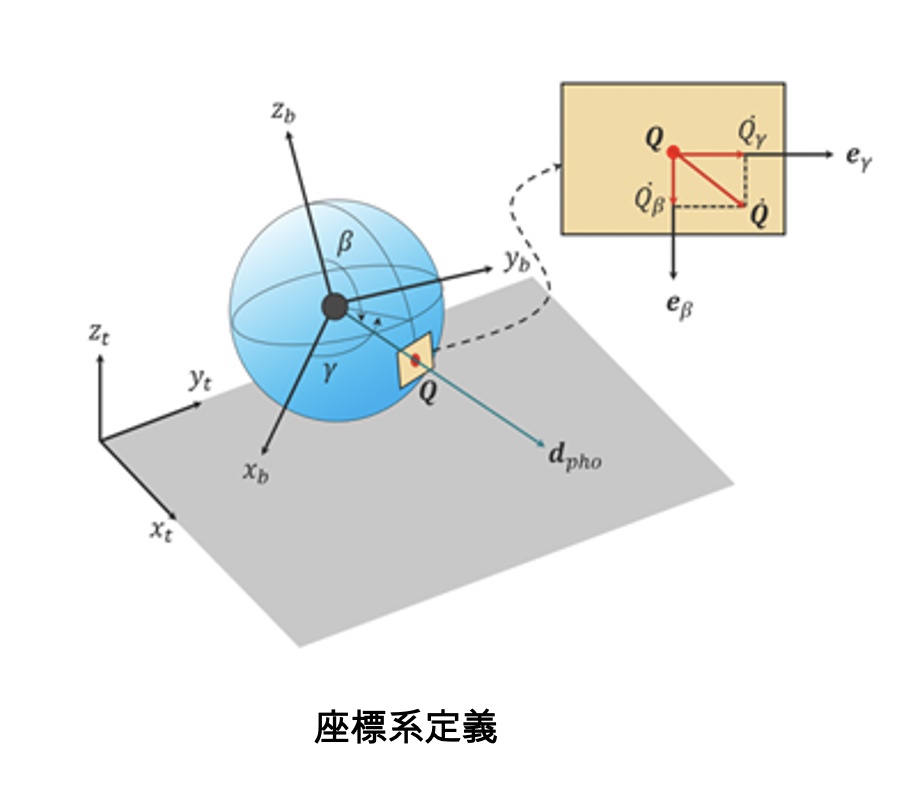
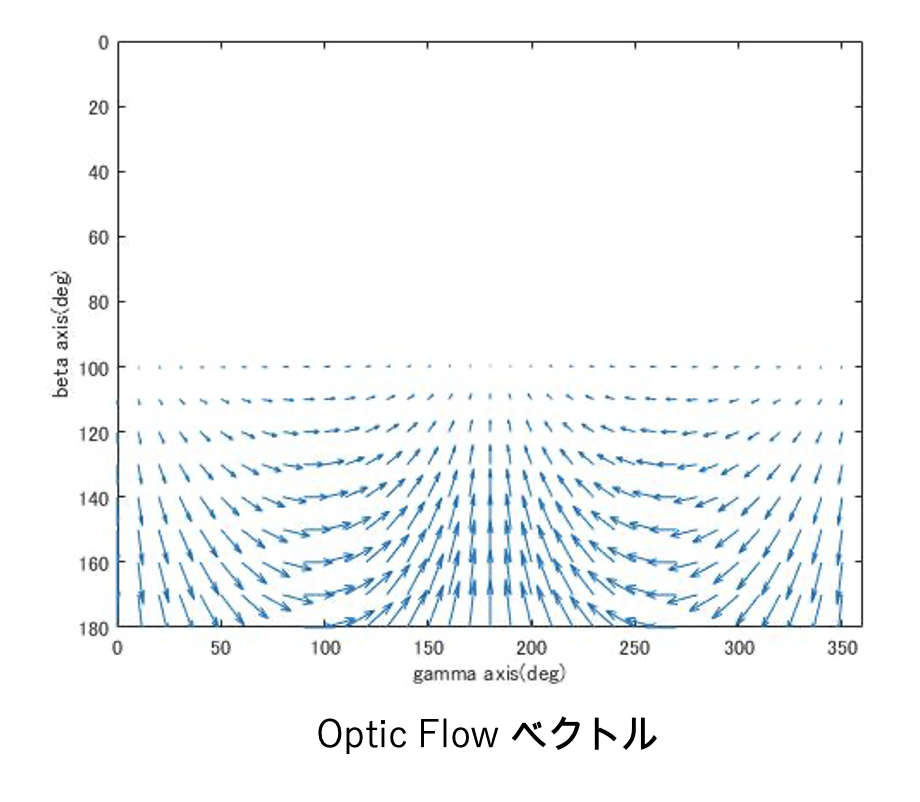
Optic flow とは動画像中の物体の動きをベクトルで表現した情報です。そのベクトルには運動物体の速度及び外部の点への距離に関する変数がありますので、距離の情報が求められます。Wide-Field Integration(WFI)という手法はハエなどの昆虫の複眼を参考にして複数点から取得した情報を総合することで、ノイズの影響を減少し、状態ベクトルを精確的に推定します。 本研究では、 WFI of Optic Flow という手法で障害物上の全部の点への距離を求め、さらに障害物の形を推定することを目指しています。 距離及び形状を精確的に推定するために、主に以下の点について研究しています。
- 形状未知の障害物に適用する方法
- ノイズ影響を抑制すること
- 特異点への距離の求める方法
チルトローター最適レイアウトに関する研究
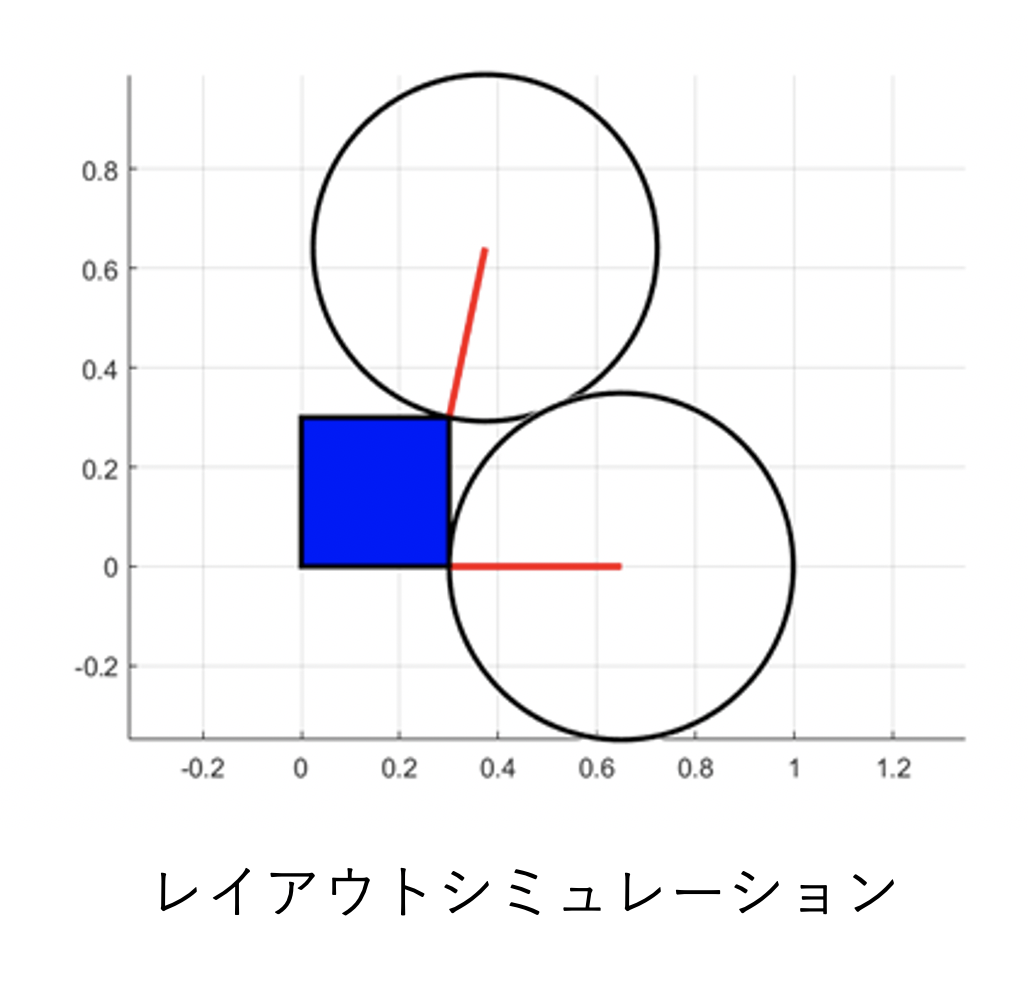
チルトローター航空機は、新しい構成原理を持つの一種の航空機であり、ヘリコプターと固定翼航空機との間の新しい概念の航空機です。一方では、チルトローターは滑走路とは無関係に離着陸することができ、他方では、高速長距離飛行用の固定翼航空機と同等であり、飛行範囲を広げることができます。チルトローターはヘリコプターと固定翼航空機の組み合わせであり、今日の世界における航空機技術の最先端、革新的かつ飛躍的な発展の結果です。 しかし、世界の国々はチルトローターのレイアウトについてバラバラであり、統一された計画を持っていません。たとえば、ローターの数、ローターのサイズ、およびローターの配置について一貫した結論はありません。 本研究では、異なる離陸重量のチルトローターにおける、粒子群最適化アルゴリズム、動的可操作度、翼素運動量、およびその他の関連理論を使用して、チルトローターの飛行に最適なレイアウトを見つけることです。そして、チルトローターのチェンジプロセスも各国の開発研究にとって難しい問題です。本研究は、ローターのチェンジプロセスの関連する研究にもなります。

カメラ動画像による探査機の状態推定
Wide-Field Integration of optic flow(WFI)という手法により探査機の状態推定に関する研究です。 Optic flow とは、動画像中の物体の動きをベクトルで表現した情報で、本研究では探査機に取り付けられたカメラから動画像を得ます。 WFI は、ハエなどの昆虫の複眼を参考にして提案された手法で、広域の情報を統合することで探査機自身の状態を推定します。 本研究室では、従来の WFI では推定されていない姿勢角の推定を行います。