過去の研究
惑星探査ローバーの研究開発
月・惑星探査のひとつの方法として、実際の天体上で
サンプルの収集・分析を行うロボット(ローバー)
を用いる方法があります。月や火星などの天体上では表面の形状や地下の洞窟中の状態など、環境がほぼ全く未知です。さらに地球から遠く離れた場所で作業するローバーには探査効率の観点からも、自律的な動作が求められます。
本研究室では、構造的な検討(移動方式)やセンシング・制御の観点から、未知環境でも自律的かつ効率的に探査を行えるような、高い信頼性をもつローバーシステムの開発を目指しています。
さらなる詳細はこちらのページ。
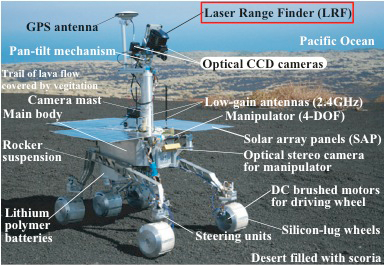
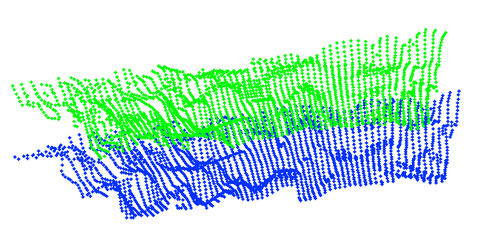
レーザーレンジファインダー(LRF)による探査ローバーの自律移動に関する研究
惑星探査活動を効率化させるための研究です。 LRF はレーザー光が対象物に当たって帰ってくるまでの時間から、その距離を推定します。 これを水平方向に回転させ、さらに垂直方向の角度を変更することで三次元の地形データが得られます。 従来の探査ローバでは、カメラによる環境認識がされていますが、計算負荷が大きくローバ上では処理できません。 そのため地上局との通信が必要になり、惑星の探査では効率が悪くなってしまいます。 LRF による方法は計算負荷が小さく、ローバ上での処理が可能になります。 カメラを用いると色やテクスチャーの情報から、滑りやスタックの可能性を推測できますが、LRF では移動距離推定によってそれらを検知する必要があるため、現在はその精度を検証中です
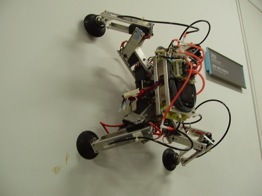
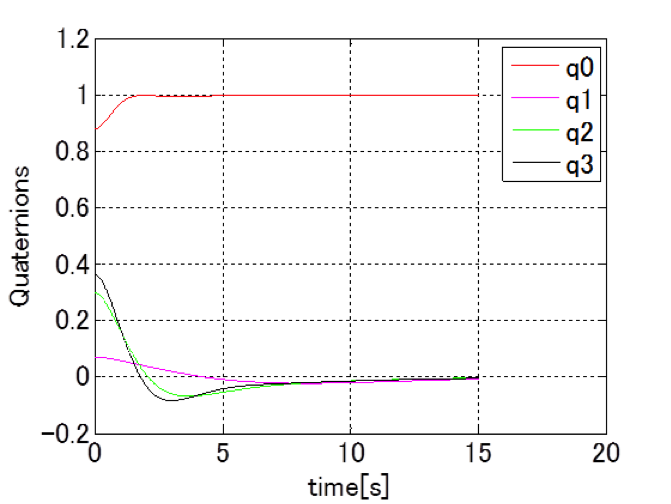
クアッドコプターの自律飛行に関する研究
本研究では、クアッドローター型ヘリコプター(クアッドコプター)の自律飛行に関する研究を行っています。 ローターは、× 字型フレームの 4 つの先端部分にそれぞれ取り付けられており、全て同じ方向に推力を発生します。 このタイプのヘリコプターは、4 つのプロペラの回転数を任意に変化させることで、垂直・水平方向に移動することができます。 本研究では、このクアッドコプターを自律飛行させるために、シミュレーションによる検証と実機を用いた実験を行っています。

並進・回転カメラを用いた探査ローバーの自己位置同定
カメラ画像を用いた周囲の環境認識手法として、ステレオ法があります。 小型ローバーでは、大きさの制限から基線長を大きく取れず、推定精度が限られます。 そこで、並進・回転機構を持ったカメラを用いることで、ローバを移動させることなく周囲の環境認識の精度を向上を目指します。
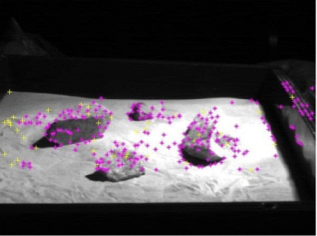
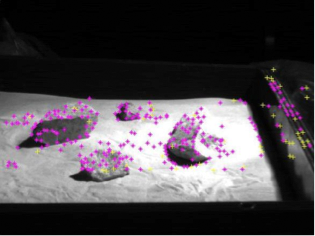
ステレオ画像による特徴点抽出の例
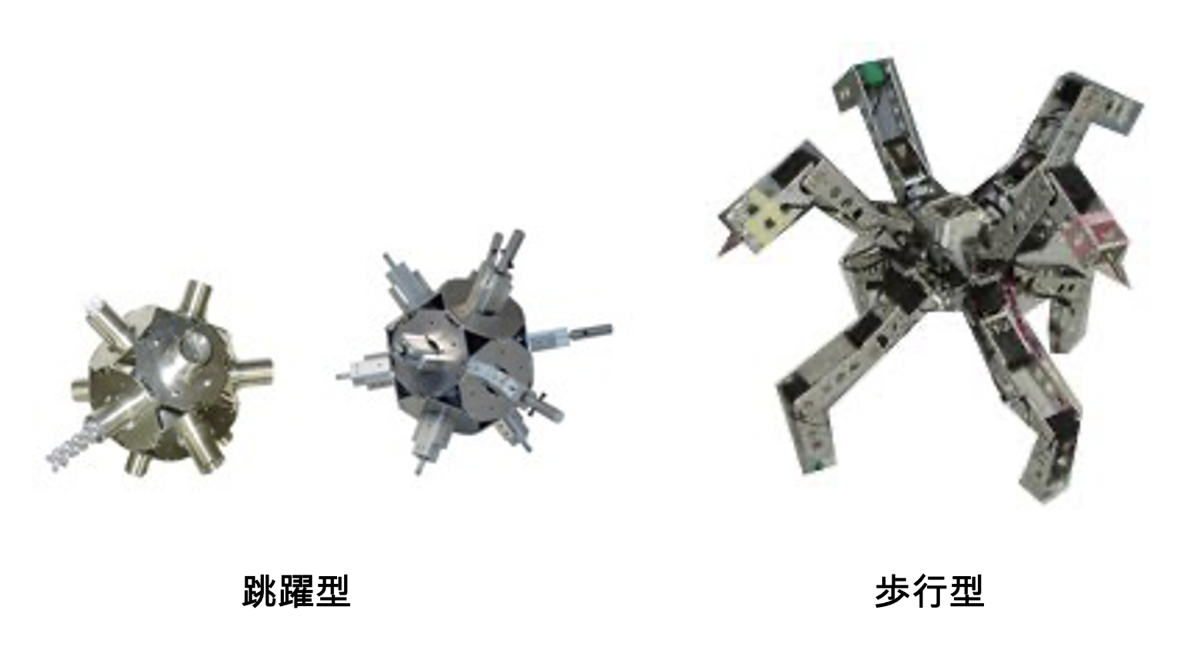
吸着脚を持つ壁歩行ロボット
垂直な壁や天井を自由に歩き回ることのできる小型歩行ロボットを研究・開発しています。
吸盤とポンプを足先に用いることで、負圧を発生し壁歩行を目指します。