劣駆動衛星の位置・姿勢制御
 劣駆動姿勢制御シミュレーション
いわゆる非ホロノミックシステムと呼ばれる、劣駆動システムに関する研究を扱っています
これまで劣駆動衛星に対して、2 つの軸周りトルクを用いた姿勢・角速度制御が多く行われてきました。
一方、本研究では、スラスターを用いることで、衛星の位置と姿勢の同時制御を目的とします。
また、スラスターの機構上、劣駆動性に加えて入力に一方向・一定値制約を持つため、入力制約を持つシステムになります。
劣駆動姿勢制御シミュレーション
いわゆる非ホロノミックシステムと呼ばれる、劣駆動システムに関する研究を扱っています
これまで劣駆動衛星に対して、2 つの軸周りトルクを用いた姿勢・角速度制御が多く行われてきました。
一方、本研究では、スラスターを用いることで、衛星の位置と姿勢の同時制御を目的とします。
また、スラスターの機構上、劣駆動性に加えて入力に一方向・一定値制約を持つため、入力制約を持つシステムになります。
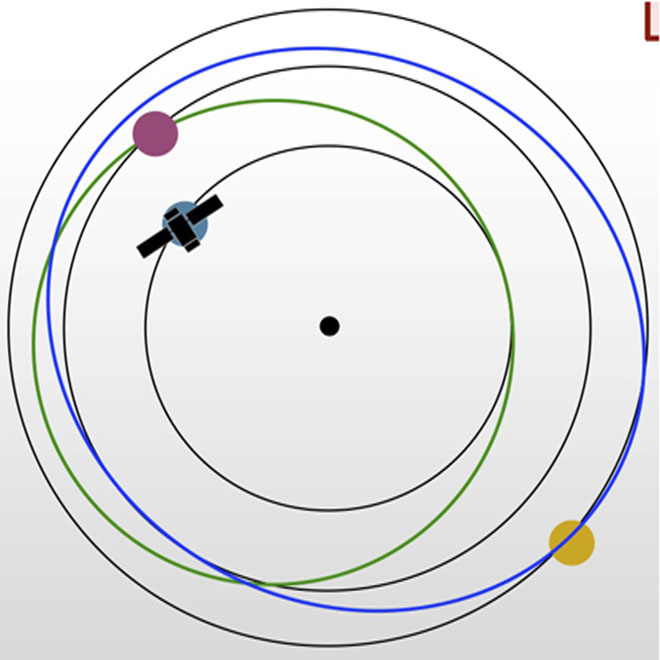
少数スラスターによるフォーメーションフライトの軌道制御
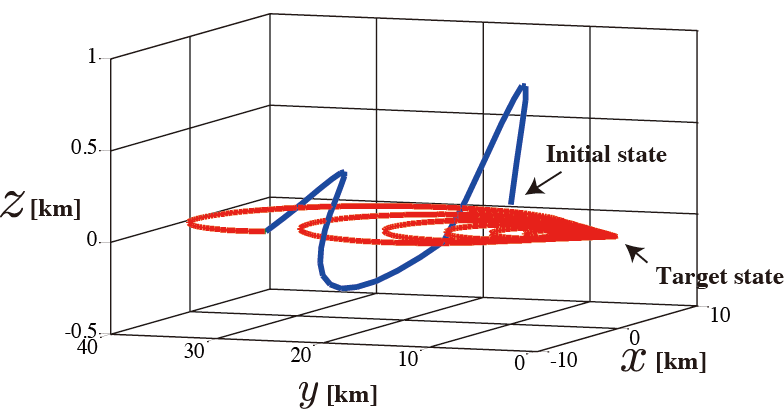 ランデブー軌道
従来の人工衛星は、姿勢制御装置としてサブスラスター、リアクションホイール(RW)、コントロールモーメンタムジャイロ(CMG)などを搭載し軌道制御用にメインスラスターを用いています。
本研究では、わずか 4 機のスラスターのみで姿勢と軌道の両方を制御できる方法について研究しています。
本研究は、制御用アクチュエーター故障時の冗長系の制御側としても有用と考えられます。
ランデブー軌道
従来の人工衛星は、姿勢制御装置としてサブスラスター、リアクションホイール(RW)、コントロールモーメンタムジャイロ(CMG)などを搭載し軌道制御用にメインスラスターを用いています。
本研究では、わずか 4 機のスラスターのみで姿勢と軌道の両方を制御できる方法について研究しています。
本研究は、制御用アクチュエーター故障時の冗長系の制御側としても有用と考えられます。
スライディングモードを用いた衛星の姿勢制御
衛星の姿勢安定化制御は、衛星運用における重要な課題のひとつです。宇宙ミッションでは、外乱など多くの不確かさが存在し、ミッションの成否は、これらに対する制御精度に大きく依存します。また、宇宙機は高度な非線形性を持つ複雑なシステムでありその制御は非常に難しいです。そこで、システムの安定化、外乱除去のみならず、プラントパラメータ変動に対してロバストな制御を行うため、スライディングモード制御(SMC)を使用し衛星を制御する研究を行っています。
月面着陸機の転倒リスク解析
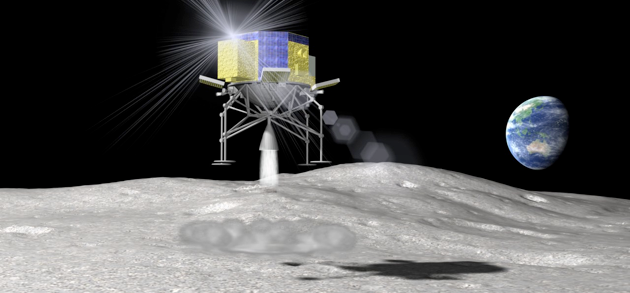 SLIMイメージ図 ©JAXA
SLIM(Smart Lander for Investigating Moon)は、小型探査機による月面を対象にしたピンポイント着陸技術実証を目指すプロジェクトです。
SLIM は小型探査機であり、 重量の関係上、センサーやアクチュエーターの数に限りがあります。そのため、従来の大型探査機と異なり、
着陸前にホバリングさせた状態で、水平方向にわずかな速度が残ることが予想されています。
ホバリングは月表面から高度 3m と想定されており、その後は自由落下させる予定です。このホバリング時に残った水平方向速度のために、
着陸時に SLIM が転倒する可能性が大きくなることが問題として挙げられています。
そこで本研究は、 着陸時に機体ピッチ角を制御することで、着陸時の転倒リスク解析・低減を目的としています。
SLIMイメージ図 ©JAXA
SLIM(Smart Lander for Investigating Moon)は、小型探査機による月面を対象にしたピンポイント着陸技術実証を目指すプロジェクトです。
SLIM は小型探査機であり、 重量の関係上、センサーやアクチュエーターの数に限りがあります。そのため、従来の大型探査機と異なり、
着陸前にホバリングさせた状態で、水平方向にわずかな速度が残ることが予想されています。
ホバリングは月表面から高度 3m と想定されており、その後は自由落下させる予定です。このホバリング時に残った水平方向速度のために、
着陸時に SLIM が転倒する可能性が大きくなることが問題として挙げられています。
そこで本研究は、 着陸時に機体ピッチ角を制御することで、着陸時の転倒リスク解析・低減を目的としています。
ソーラーセイルの軌道計画
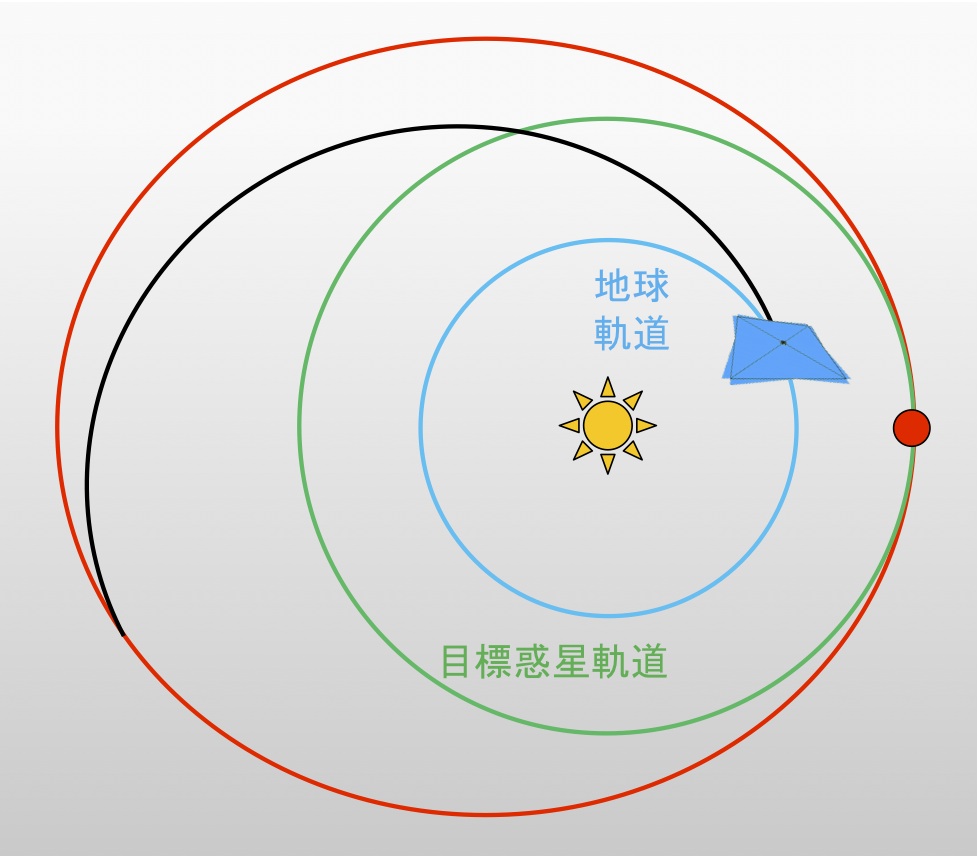 ソーラーセイル軌道計画
ソーラーセイルとは宇宙空間に巨大なセイル(帆)を張り、太陽光をそのセイルで受け、その反発力を推進力として利用する宇宙機です。
軌道計画問題を考える際、通常の宇宙機は推力の向きと大きさを自由に入力として与えられますが、ソーラーセイルの場合は推力の向きと大きさを独立に選ぶことができず、入力の自由度が少ない劣駆動システムとなり、より難しい問題となります。
従来は数値繰り返し計算に頼った手法が研究されてきましたが、本研究室では非線形制御理論を用いることで、数値繰り返し計算に頼らない軌道計画法の導出を目指しています。
ソーラーセイル軌道計画
ソーラーセイルとは宇宙空間に巨大なセイル(帆)を張り、太陽光をそのセイルで受け、その反発力を推進力として利用する宇宙機です。
軌道計画問題を考える際、通常の宇宙機は推力の向きと大きさを自由に入力として与えられますが、ソーラーセイルの場合は推力の向きと大きさを独立に選ぶことができず、入力の自由度が少ない劣駆動システムとなり、より難しい問題となります。
従来は数値繰り返し計算に頼った手法が研究されてきましたが、本研究室では非線形制御理論を用いることで、数値繰り返し計算に頼らない軌道計画法の導出を目指しています。
複数個のターゲットへのランデブー軌道計画
 ランデブー軌道計画
複数個のターゲットへランデブー(スペースデブリ除去など)ミッションを計画する時に、どのように軌道を計画すればよいかを研究しています。
ここでは、ランデブーを記述する方程式として、一般的に用いられている CW 解ではなく、非線形解の Lambert 問題を用いた軌道計画手法の提案を目指しています。
ランデブー軌道計画
複数個のターゲットへランデブー(スペースデブリ除去など)ミッションを計画する時に、どのように軌道を計画すればよいかを研究しています。
ここでは、ランデブーを記述する方程式として、一般的に用いられている CW 解ではなく、非線形解の Lambert 問題を用いた軌道計画手法の提案を目指しています。