 クリックして拡大 |
宮園晃輝君(2020年修士修了)が日本航空宇宙学会賞(奨励賞)を受賞しました. 論文タイトル : フラットスピンを用いた小型固定翼無人機の 定点垂直着陸法の基礎研究 |
 クリックして拡大 |
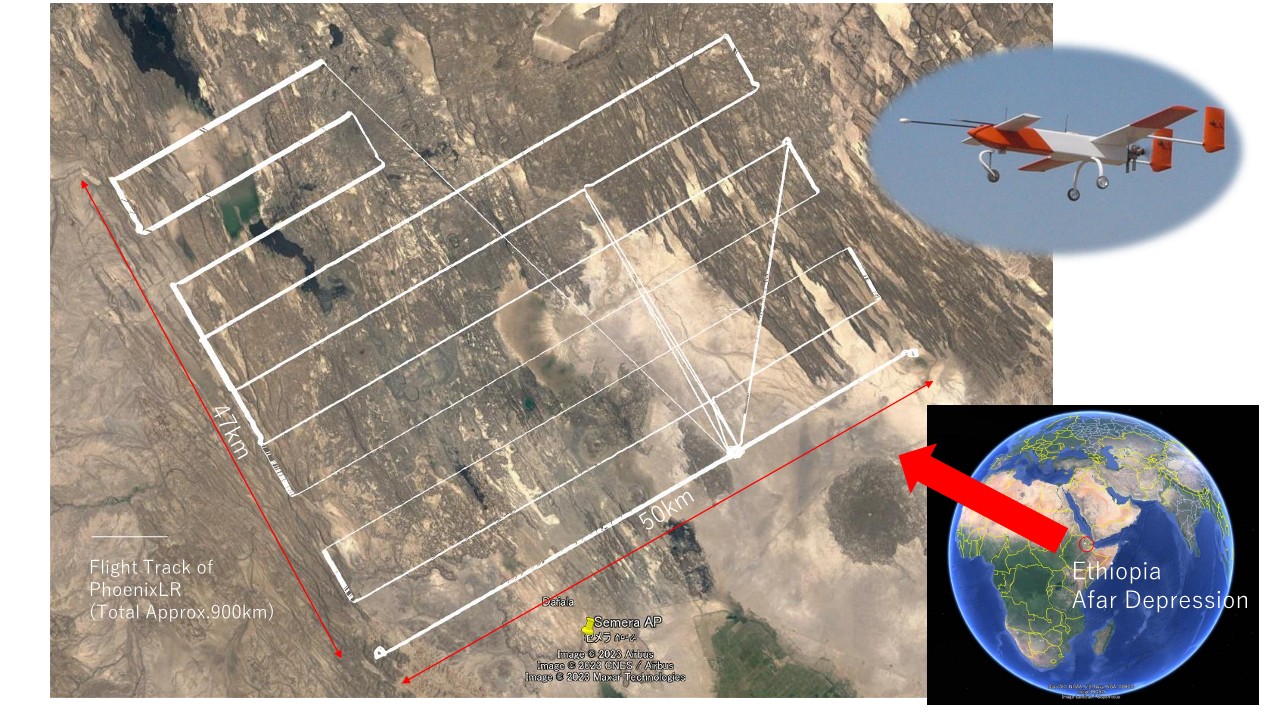
2019年に続き,2023年11月,長距離型UAV (Phoenix-LR)による
エチオピア・アファール凹地の空中磁場探査
(総飛行距離:約900km)に成功しました. |
 クリックして拡大 |
岩附陽太君(M2)がAsia Pacific International Symposium on Aerospace Technology 2023, APISAT2023 (中国,海南島陵水Lingshui,2023/10/16-18)で,Best Student Paper Awardを受賞しました. "Generation of Optimized Trajectories for Congestion Mitigation in Fukuoka Approach Control Area Using Deep Reinforcement Learning" |
畑中篤之君(M2)が日本航空宇宙学会西部支部講演会2020で優秀学生講演賞を受賞しました.
「小型固定翼 UAV のフラットスピン領域における空力モデル構築に関する研究」
宮園晃輝君(M2)が日本航空宇宙学会西部支部講演会2019で最優秀学生講演賞を受賞しました.
「フラットスピンを用いた小型固定翼無人機の定点着陸法の研究」
 |
大陸分裂過程から海洋底拡大への移行期にあり,プレート拡大軸が陸上に露出している世界でも稀有な地域である
エチオピア・アファール凹地で,当研究室で設計・開発した長距離型UAV Phoenix-LR 8号機により
飛行総距離800kmにおよぶ空中磁場探査に成功しました. (科研基盤研究A,代表:石川尚人教授) 詳細はこちら |
堤雅貴君(M1)は,第60次日本南極地域観測隊夏隊同行者として参加し,
南極昭和基地周辺で気球分離型無人航空機によるエアロゾル観測を行い無事帰国しました.
これまでの観測高度(高度23km)および滑空開始高度(12km)は,諸々の事情により,
残念ながら更新できませんでしたが,学生単独での観測フライトを成功させました.
浜野惇君(M1)が日本航空宇宙学会西部支部講演会2017で優秀学生講演賞を受賞しました.
「高高度気球分離型自律帰還UAVの飛行実験による空力特性の推定に関する研究」
大曲宏樹君(D1)がAPISAT2017 (2017 Asia-Pacific International Symposium on Aerospace Technology) でBest Student Awardを受賞しました.
「Evolutionary Multi-objective Optimization Method for Drone Delivery Problem」
BS朝日 南極観測60周年記念番組「遥かなる南極 -南極観測隊 5つの偉業-」
放送 2017/1/29(日) 13:00-13:30
井手慎之介君(B4)が日本航空宇宙学会西部支部講演会(2016)で学生優秀講演賞を受賞しました.
「画像処理によるUAVの自己位置同定に関する研究」
"Flight Trajectory Optimization for Operational Performance Analysis of Jet Passenger Aircraft"
詳細はこちら
日本航空宇宙学会誌7月号の表紙はこちら
記事はこちら
(閲覧にはIDとパスワードが必要ですがAviationweek and Space Technologyを購読していればIDとパスワードが発行されています.)
英文プレスリリース
国立極地研究所・福岡大学・九州大学共同プレスリリース
サイエンスポータル
朝日新聞デジタル
まいなびニュース
RKB毎日放送のページ(2月8日放送)はこちら
松田治樹君(M2)が日本航空宇宙学会西部支部講演会(2014)で学生優秀講演賞を受賞しました.
「GPS データを用いた飛行状態推定と軌道最適化による旅客機の運航効率の分析」
4回目の南極です.
文部科学省の報道発表はこちら
瀬戸口一穂君(M2)が日本航空宇宙学会西部支部講演会(2013)で学生優秀講演賞を受賞しました.
「小型回転翼UAVの災害監視用パスプランニング」(JSASS-2013-S015)
第54次南極地域観測隊での観測フライトの様子がBS朝日の「南極日和」(#146)で放送されました.
バックナンバーはこちら
動画へのリンクはこちら(動画34の中ほど)
2011年のリビングストン島〜デセプション島への磁場探査UAVフライトの記事が 国立極地研究所の広報誌 「極」2013年春号に掲載されました.
第54次南極観測隊で実施した気球とUAVを組み合わせた世界初の方式よるエアロゾル観測の成功(高度10km)がプレスリリースされました.
極地研究所のプレスリリースはこちら.
九州大学のプレスリリースはこちら.
福岡大学のプレスリリースはこちら.
【ニュースサイト】
朝日新聞DIGITAL
時事ドットコム
日本航空協会 航空・宇宙の出来事 2011年12月
OPTRONICS
第54次南極観測隊で実施予定のエアロゾル観測用UAVの記事が
朝日新聞朝刊に掲載されました.
デジタル版はこちら.
宮本侑斗君(M2)が日本航空宇宙学会西部支部講演会(2012)で学生最優秀講演賞を受賞しました.
「動的計画法による旅客機の軌道最適化計算の高速化に関する一考察」
西村 太貴君(M2)が日本航空宇宙学会西部支部講演会(2012)で学生最優秀講演賞を受賞しました.
「気球分離型エアロゾル観測用無人航空機に関する研究」(JSASS-2012-S003)
第54次南極観測隊で実施予定のエアロゾル観測用UAVの記事が
西日本新聞朝刊に掲載されました.
デジタル版はこちら.
文部科学省の報道発表はこちら
 |
このUAVで南極昭和基地付近において 高度9000m付近までのエアロゾル観測と 観測後のセンサ・機体の自律滑空回収実験を 実施予定です. 福岡大学林研究室との共同研究です. |
昨年に引き続き,今年も東野准教授が国立極地研究所の船木先生他2名と合計4名で南極でのフライトにチャレンジしてきました.
今年は韓国極地研究所(KOPRI),チリ南極研究所(INACH),ブルガリア南極研究所,ブラジル空軍,スペイン海軍,チリ海軍の協力により,
リビングストン島にあるセントクリメント基地(ブルガリア)およびキングジョージ島にあるキングセジョン基地(韓国)に滞在しました.
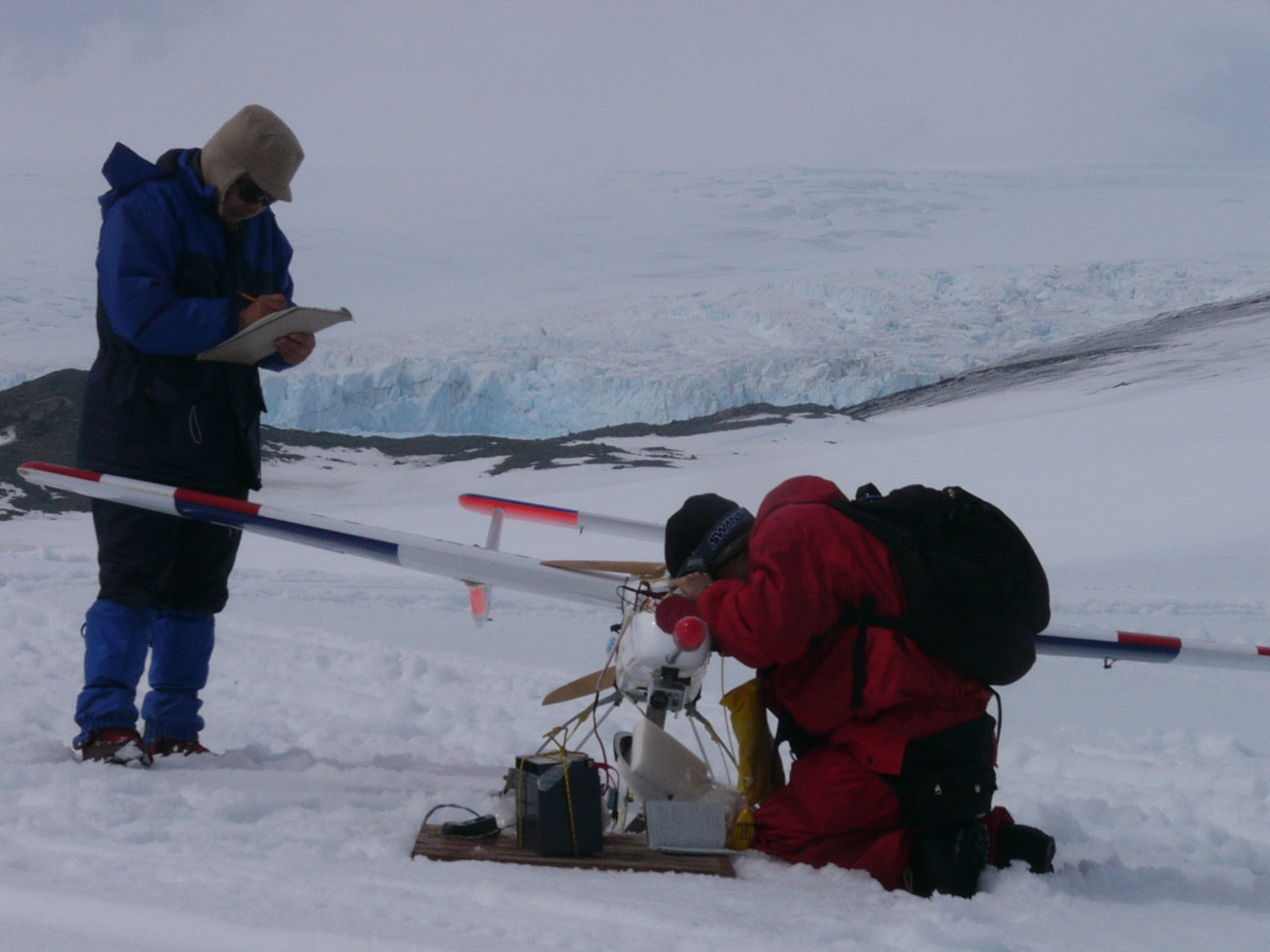
リビングストン島では,基地近くの氷河上から,AntPlane3-5号機(通称インド号)が離陸,セントクリメント基地が面する
サウスペイをグリッドサーベイし,ハイビジョンカメラで氷河や海上の様子を捉え,
1時間7分後に飛行距離約105kmのフライトを終えて無事帰還しました.
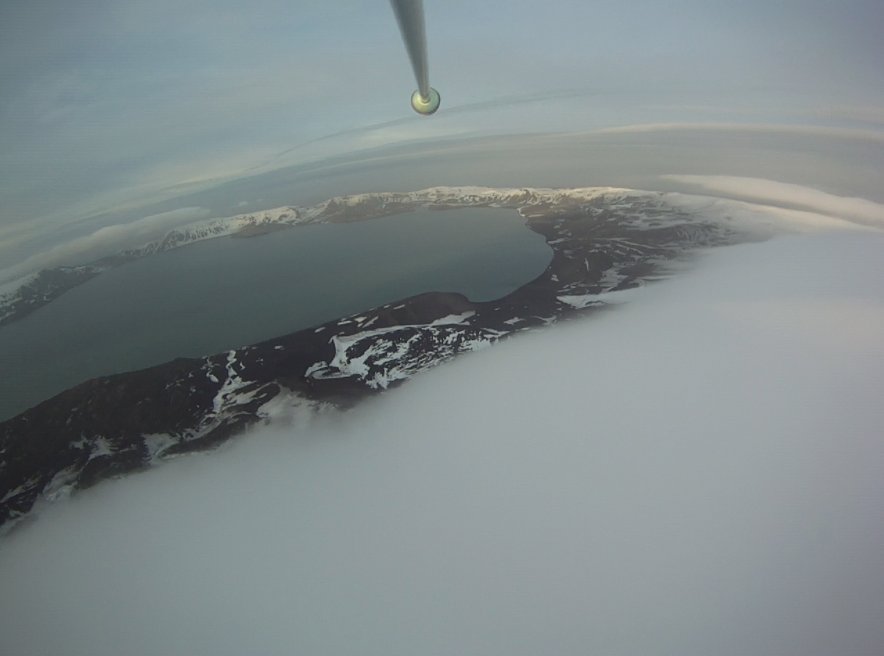
セントクリメント基地の滞在期限終了が迫る中,AntPlane6-3号機は白夜を利用して夜中2時頃に
同じくセントクリメント基地の氷河から離陸し,南に約35km離れたデセプション島に向かって飛行.
デセプション島上空では磁場探査のためのグリッドサーベイ飛行とハイビジョン映像撮影を行い,
3時間38分後の早朝5時半に約302kmの旅を終えて帰還しました.
デセプション島上空のデータはこれまで取得されたことがなく,世界初のデータとなりました.
以下に現地で撮影した写真を掲載しています(クリックすると拡大します)
[関連リンク]
 |
 |
 |
 |
| スキーを履いて氷河上から離陸する AntPlane3-5号機(通称「インド」) |
プリフライトチェック中の AntPlane6-3号機 |
総飛行距離105kmのフライトから 無事帰還したAntPlane3-5号機 |
全面的にサポートしていただいた ブルガリア基地の隊員とともに |
 |
 |
 |
 |
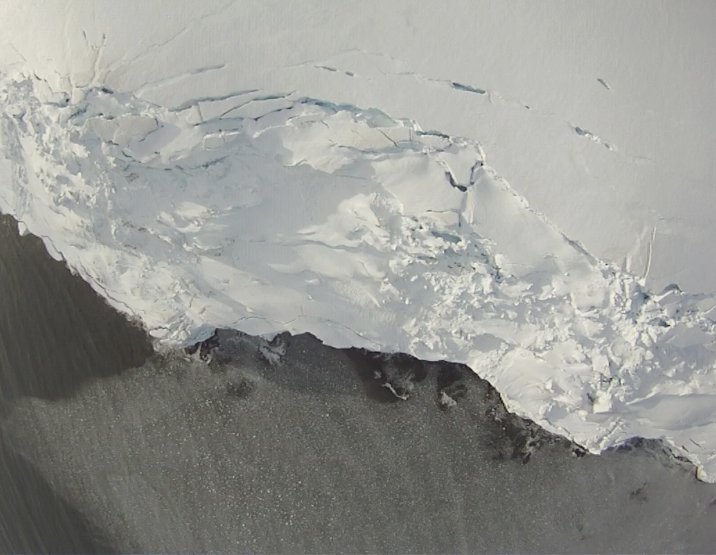
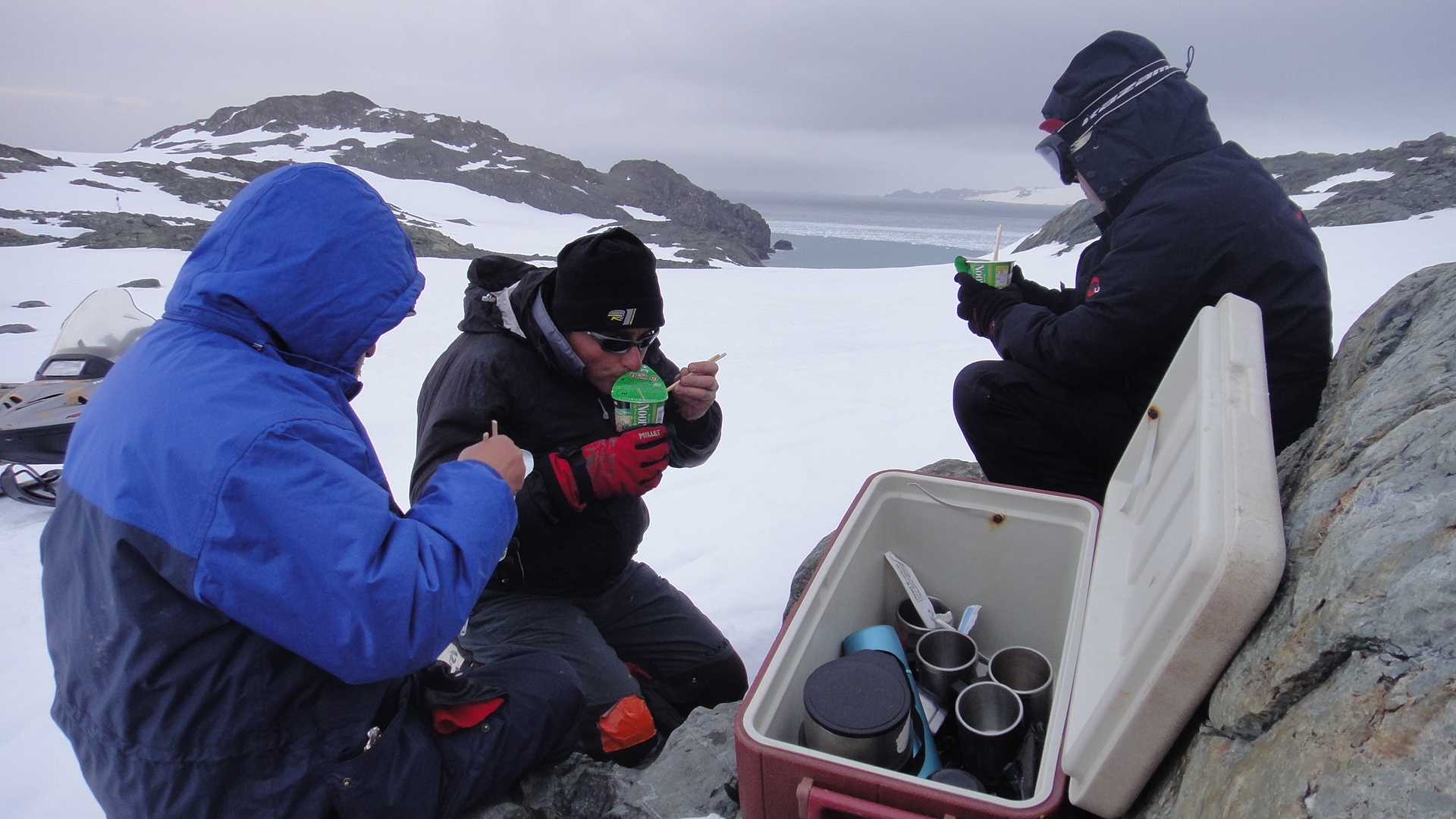
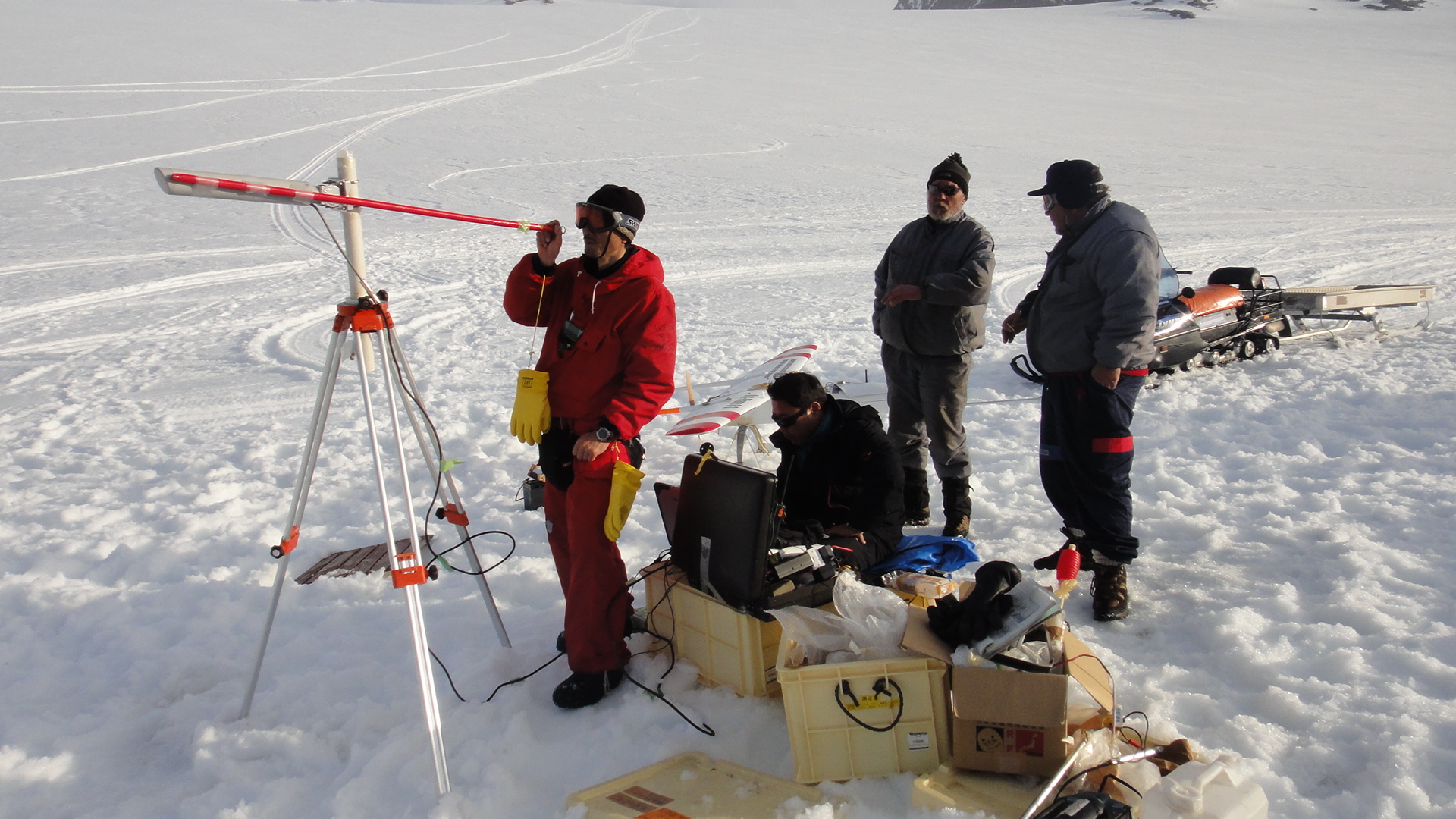
| AntPlane3-5号機が捉えたSouth Bay,氷河口と通称「Ice Soup」(高度400m) | AntPlane6-3号機が捉えたDeception島.手前の白い部分は雲,画面中央上部は磁場センサとブーム.(高度800m) | 帰投までの約3時間,凍える寒さと空腹を日本から持参したカップ麺でしのぎます.中央はブルガリア基地隊長 | AntPlane6-3号機フライト中の グランドステーション. この時は寒かった. |
 |
 |
 |
 |
| AntPlane3-5号機フライト中の グランドステーション. 八木アンテナでデータダウンリンク |
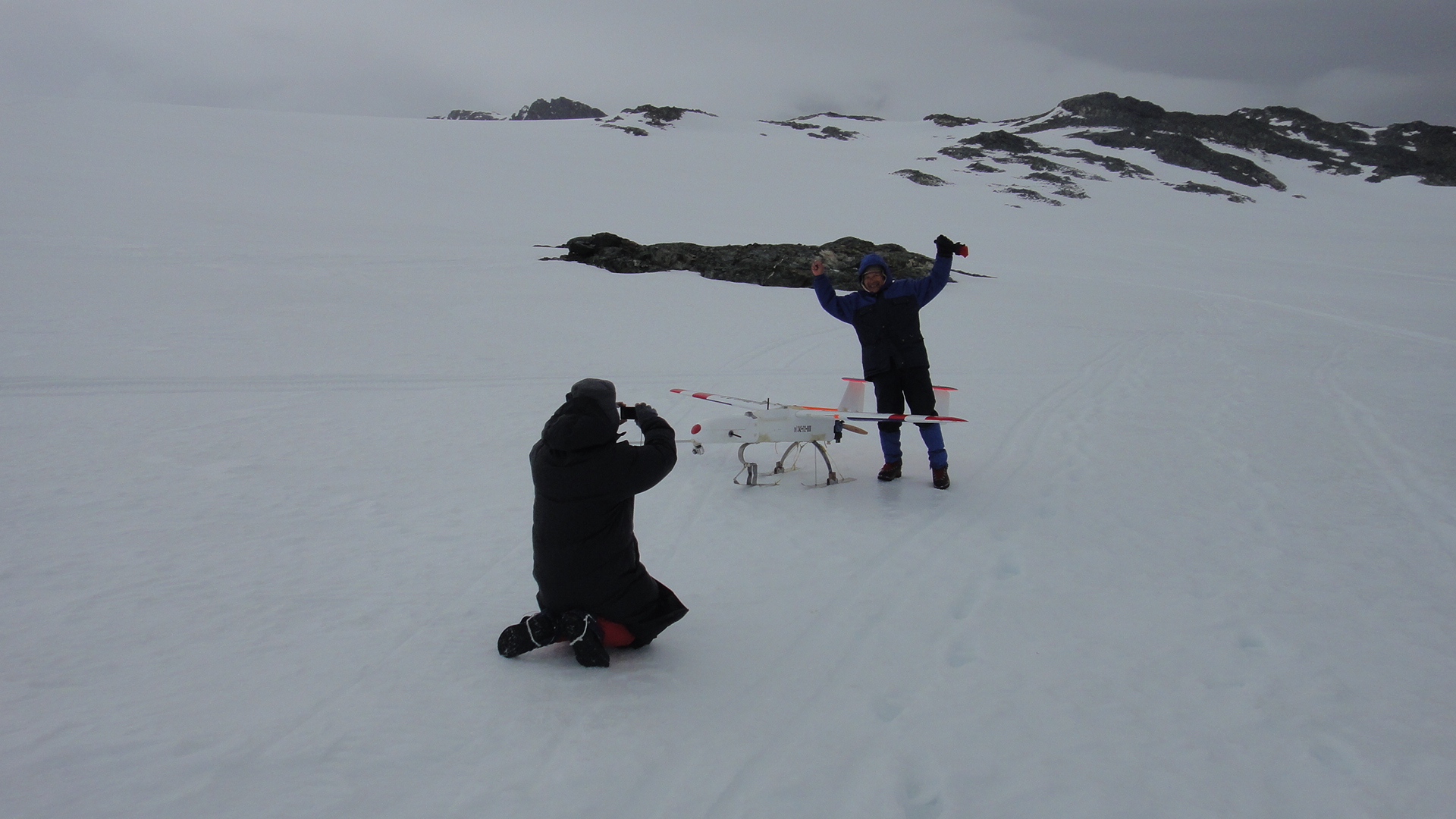
朝5時半頃,AntPlane6-3号機が無事帰還して大喜びの極地研・船木先生 | ゾディアック(ゴムボート)から見た ブルガリア基地 |
基地前に掲げられている滞在隊員の国旗.上からブルガリア,スペイン,日本(Tシャツに赤マジックで作りました),モンゴル,ポルトガル.South Bay対岸の氷河が見える |
 |
 |
 |
 |
| 基地間の移動は船ですが港はないので,海岸からゾディアック(ゴムボート)で機材とともに船に乗船します | キングジョージ島〜リビングストン島間の移動でお世話になったスペイン海軍の"Las Palmas" | キングジョージ島〜プンタアレナス間の移動(復路)でお世話になったチリ海軍の"Aquiles" | プンタアレナス〜キングジョージ島間の移動(往路)でお世話になったブラジル空軍のC130 |
 |
 |
 |
 |
| 後半お世話になったKingSejong基地(韓国).我々の到着時にちゃんと日の丸が掲揚されていました. | KingSejong基地周辺には離着陸できる平地がないため,約2km離れた雪面まで雪上車で物資を運んでもらいました | 毎回雪上車が使えるわけではないので,一旦運んだ機材はこのように雪に穴を掘って保管します.後は毎回徒歩で往復. | 待機中のAntPlane3-5号機 地上風速が大きかったり(20m/s以上),霧,雪,雨などで残念ながらほとんどフライトできませんでした |
 |
 |
 |
 |
| 機材撤収のために再度雪上車で現場へ.この日も霧で視界が悪い状態でした. | 流氷とペンギンと霧でこんな幻想的な 風景になることも |
KingSejong基地が面するMarian Cove奥の氷河前に現れたクジラ | 晴れていれば,夜中12時くらいに 夕日に染まる氷河を見られることも |
国立極地研究所との共同研究によって開発した,空中磁場探査用のUAVによって,南極キングジョージ島での
フライトに成功しました.
当地は南半球の暴風圏の端にあたり,大変に気象条件が厳しい場所でしたが,
数少ないチャンスの中で,飛行時間で最高約1時間,飛行距離約100kmのフライトに成功しました(AntPlane6-3号機).
飛行中に記録された最高風速は23m/s(上空,高度300m)でした.
なお,この観測は来年度も実施され,本格的な空中磁場探査が行われる予定です.
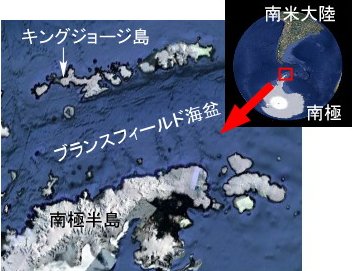 |
 |
| 南極キングジョージ島(GoogleEarthより) | 氷河をバックに離陸するAntPlane3-4号機(通称「インド」) |
2010年4月28日の日経新聞(九州版,九州経済B面)で,当研究室と福岡大学の林研究室と共同で開発中(機体システム:九州大学,観測システム:福岡大学)の
エアロゾル観測装置回収用気球分離滑空型UAVの記事が掲載されました.
(記事に掲載の2010年2月の実験の動画はこちら(wmvファイル,7MB))
|
2009年12月2日の日刊工業新聞「航空機技術のフロントランナー」欄で,当研究室で開発したUAVが
紹介されました.
 |
独立行政法人電子航法研究所との共同研究を実施している自律無人ヘリコプター(開発中)についての 記事が,ラジコン技術5月号(54ページ〜55ページ)に紹介されました.
PPG(Powered ParaGlider)の自動飛行に取り組んできましたが,長時間(60〜120分)の安定した
自動飛行が可能になりました.
PPG(Powered ParaGliderの自動飛行の様子はこちら
 |
飛行力学研究室のUAV「インド号」が自律制御装置によって自動アクロバット飛行(ループ,ロール,インメルマン) に成功しました.(2008年11月14日,映像をアップしました.)
当研究室と(株)ゼノクロスが共同開発したUAVおよび自律制御装置AP-CUBが,日本経済新聞(2008年8月15日九州版「個性派企業ファイル」欄)に紹介されました.
当研究室のUAV "インド号"は,初飛行以来,毎年改良を重ねながら飛行実験を継続して来ましたが,2008年8月5日の飛行実験において,積算自動飛行時間(ラジコン操縦による離陸,着陸にかかる時間は除く)が24時間を超えました.
梅雨目前の6月8日(日),産山村ウルトラライト飛行場において,KRネット(九州ラジコンショップネットワーク)
主催の2008年度KRネット競技会で,UAVのデモ飛行を披露しました.
(KRネットの競技会レポートはこちら)
昼休みを利用した10分程度のデモ飛行でしたが,パイロットによる離陸後,すぐに自動飛行モードに切り替え,
RW27のトラフィックパターンを自動飛行により周回しました.
今回は,単なる自動飛行だけでなく,
胴体下部に設置したジンバルカメラによるダウンリンク映像も見ることができるようにしました.
途中,高度変更のデモも行いましたが,あいにく雨がぱらつき始め,持ち時間も残り少なくなったため,
自動モードから手動モードに切り替え,無事着陸させました.
KRネットのみなさんには大変お世話になりました,どうもありがとうございました.
また,何枚かの写真は,大牟田ラジコン模型の猿渡さんからご提供いただきました.どうもありがとうございます.
(写真はクリックすると拡大されます.)
 |
 |
 |
 |
| 開会式前に全員で記念撮影 中央右寄りの黄色い主翼の機体が 飛行研UAV インド6号機 |
出番を待つ インド6号機 | 熱心に競技に見入る参加者のみなさん | 重量・重心のチェック ノーズギアとメインギアの間に カメラドームが見える |
 |
 |
 |
 |
| 離陸直前のインド6号機 | グランドステーションの画面と ダウンリンク映像を覗き込む 競技会参加者のみなさん |
自動飛行中の(ヒマな)パイロット 操縦はしていませんが 念のため機体を注目しています |
オペレータに熱心に質問される 競技会参加者のみなさん |
2008年5月22日(木)熊本県阿蘇郡産山村において,フライングハイスカイスポーツクラブの飛行場をお借りして離着陸を行い,
空中磁場探査を想定したグリッドサーベイ飛行に成功しました.
この飛行は,当研究室が国立極地研究所との共同研究により開発したUAVが,磁場探査を行う際に一般的に利用される
グリッドサーベイ飛行を確実に行えるかどうか検証するために行われました.

当日は五月晴れ,南西の風約3.0m/sの絶好のコンディションとなり,約45分間,飛行距離約75kmの連続自動飛行を終え, UAVは無事帰還しました. また,この飛行により,当研究室のUAVの自動飛行による累積飛行時間は22時間30分となりました.
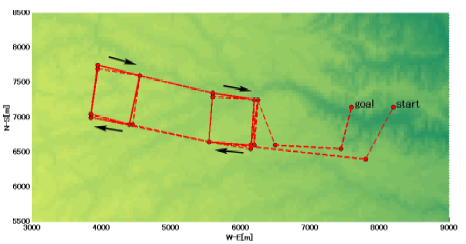
今回の実験では,上写真のように翼端のペイロードポッド部分に磁場センサと同重量のダミーウェイトを搭載し,下図に示すように,
産山牧場西側の2km×2kmの牧草地域において,250m間隔で東西方向に飛行するグリッドサーベイ飛行を行いました.
下図右側のトラフィックパターンから出発し,西側にある産山牧場の風車を大きく迂回して南側を飛行後,サーベイ対象
の2km×2kmの領域を250m間隔で東西に飛行したのち,再び風車の南側を大きく迂回してトラフィックパターンに帰還した
様子がわかります.
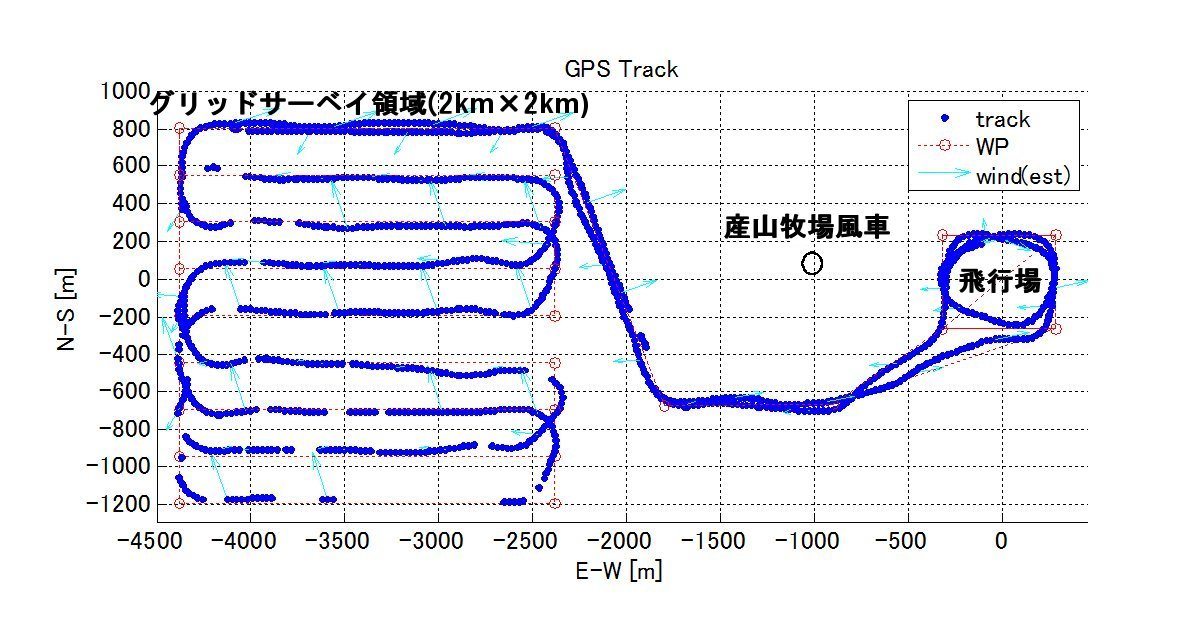
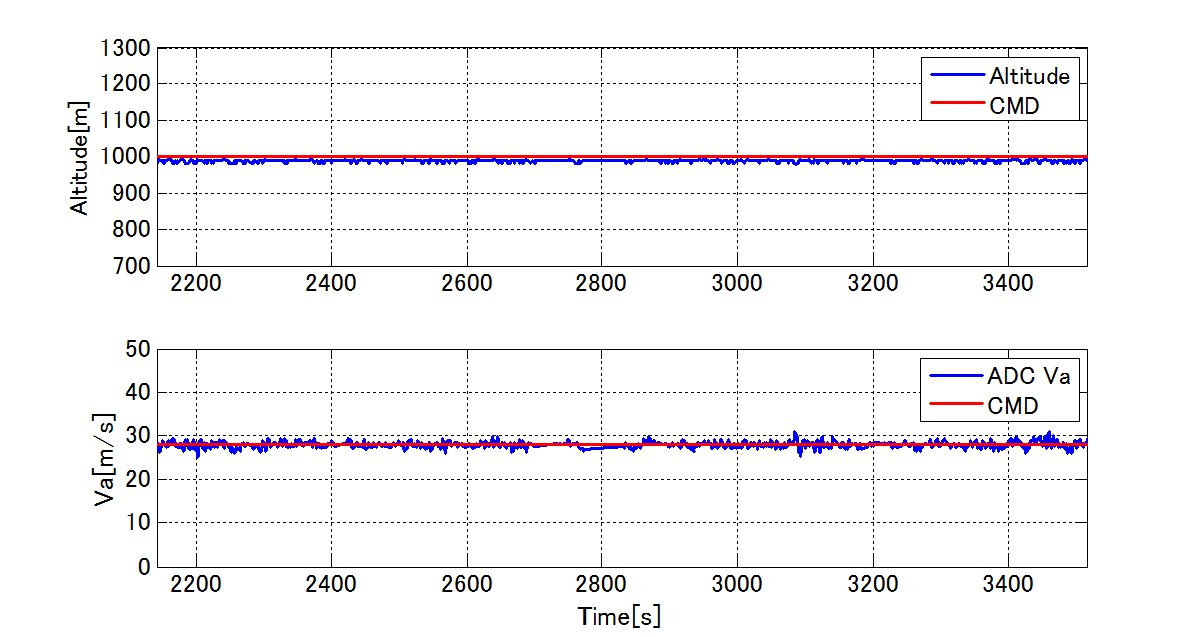
手動操縦による離陸後,自動操縦に切り替えられたUAVは,下図に示すように,28m/sの指定速度および気圧高度1000mの 指定高度に非常によく追従しつつ,飛行を行いました.なお,この飛行は地面からの高度を250m以下とし, 航空法第99条の2第2項の規定による通報を必要としない飛行方式で行っています..
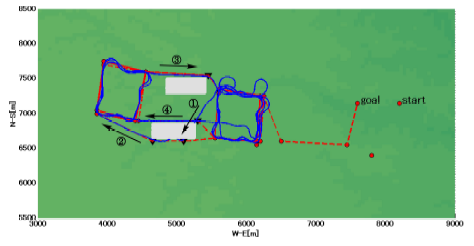
離着陸に利用した飛行場からグリッドサーベイ空域の西端までは,約5kmの距離があり,地面からの高度が低いため,
飛行ルートの大半でダウンリンクデータが届かないことが予想されたため,ミニバンにグランドステーションを設置し,
自動飛行開始とともに,グランドステーションはグリッドサーベイ領域北側に移動して,ダウンリンクデータの受信を
行うとともに,双眼鏡による監視も行いました.それでも,軌跡図からもわかるように,時々ダウンリンクデータが
途切れている部分があります.
この飛行により,空中地場探査などのためのグリッドサーベイ飛行がほぼ問題なく行えることが確認できましたので,
9月には,国立極地研究所との共同実験として,実際に磁場センサを搭載し,鹿児島県の桜島において空中地場探査飛行を行うことを予定しています.
川口 純一郎が日本航空宇宙学会西部支部講演会(2007)で学生最優秀講演賞を受賞しました.
「ダイナミックインバージョンを用いた飛行制御則の構造化に関する研究」
2007年1月末から,昭和基地からやや内陸に入ったS17と呼ばれる地点において,
我々のUAV(Ant-Plane)を含むUAVの運用実験が行われました.
夏隊は,大変短い期間の間にたくさんの仕事をこなさなければならないのですが,
我々のUAVの運用実験が予定された短い期間内に,運悪く風速25m/sのブリザードが吹き荒れ,
予定最終日になってもブリザードがおさまらなかったため,残念ながら実験中止との
報告がありました.
再びトライできるのは1年後となります.


2006年12月12日(火)熊本県阿蘇郡産山村において,EA(Evolutionary Algorithm)を用いたリアルタイムパスプランニングの飛行実証実験に成功しました. 当日は曇りで時折雨の降る状況でしたが,約40分間,飛行距離約70kmの連続自動飛行を終え,UAVは無事帰還しました.
今回の実験では,グランドステーションにシリアル接続したノートPC
(パスプラニングコンピュータ)でリアルタイムパスプラニングの計算を行い,UAVの飛行中に仮想障害物の情報をパスプラニングコンピュータに与え,計算された仮想障害物の回避用ウェイポイントをグランドステーションを介してUAVにアップリンクする方法で実験を実施しました.
現在のアップリンク/ダウンリンクシステムでは,グランドステーションとUAVの距離が数km以上離れると
通信が途切れてしまいます.これを回避するために,自動車にグランドステーションを設置し,
飛行中のUAVを追尾しました.最も遠いウェイポイントは,発進地点からおよそ5km離れており,発進地点からは
飛行の様子が目視できません.万が一のトラブルの場合には,ラジコンで操縦をテイクオーバーできるよう,パイロットも自動車に同乗させて実験を行いました.また,ラジコンによるテイクオーバーも出来ない場合に備え,自動開傘式の緊急用パラシュート (開傘試験の様子は飛行実験動画集をご覧下さい.) を備えています.
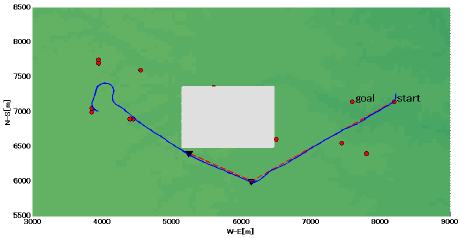
初期のウェイポイント情報は,グランドステーションコンピュータとパスプラニングコンピュータとの通信によりパスプラニングコンピュータが保持しています.また,パスプラニングコンピュータは飛行中のUAVの位置データを時々刻々ダウンリンクしています. UAVが離陸した後,パスプランニングコンピュータに仮想の障害物(積乱雲などを想定)を与えて,以下のような仮想障害物の回避パスを,パスプラニングコンピュータでリアルタイムに計算させました.
計算終了と同時に生成されたパスはアップリンクされグランドステーションでUAVの回避行動を確認しました.
ほとんどが視界外飛行となりましたが,一部は目視での確認もできました.
約40分の飛行経路と回避行動の様子をプロットした図を紹介します.
今回の実験は,ほぼ成功と言えるものですが,いくつかの問題点も見つかりました.
それらの問題点を解決し,今後は,より多くの障害物がある状況下での回避行動等を実証するための実験を予定しています.
{kind=link}