国立極地研究所との共同研究により,南極でのUAV運用に向けての研究に取り組んでいます.市販のR/C模型飛行機に私たちの研究室で独自に開発した自律飛行システムを搭載し,南極におけるルート探索,空撮などのミッションを展開することを目指しています.
南極でのUAVの運用では,低温環境での動作保証(-20℃程度)とUAVに関する知識の乏しい観測員(半自動離着陸及び自律飛行の達成)でも取り扱い可能なシステムの設計・開発が要求されます.
ルネサステクノロジー社製の16ビットシングルチップコンピュータH8S2638をベースに,専用の制御用ハードウェアを独自に開発しました.制御用ハードウェアはCPU部分とセンサをそれぞれ別のボードに分けた構成にしています.CPUボード,センサボードとも大きさ3cm×9cm,重さ約30gと超小型・軽量です.
高度,速度,コースを保持するために,UAVの運動エネルギーとポテンシャルエネルギーとを考慮した制御則であるTECS(Total Energy Control System)とTHCS(Total Heading Control System)を利用しています.そのままでは私たちの制御目標を満足しないため,高度ロスを解消するためのヨーレートのフィードフォワード制御や,コースとの見通しベクトルに基づいたコースずれ(クロストラックエラー)の解消,リアルタイムに推定した飛行中の風の影響を考慮した制御などを組み込んでいます.
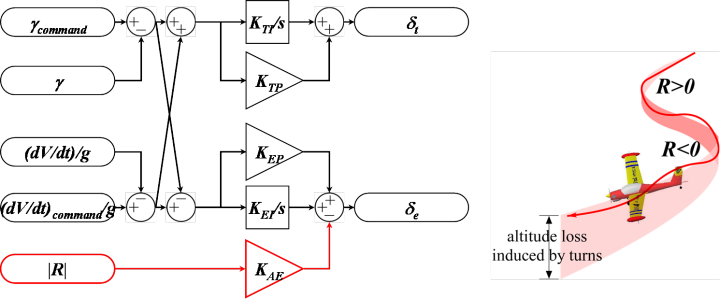
TECSのブロック線図と高度ロス解消法
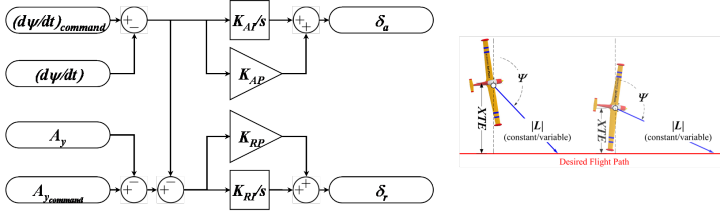
THCSのブロック線図とコーストラックエラー解消法
Autopilotの飛行実証実験では,今秋,1時間15分,100kmの自動飛行に成功しました.設定したウェイポイントの構成は周回コースと視界外往復飛行コースを組み合わせたものです.途中モデムのダウンリンクが途絶えたために航跡図の一部が欠落しています.この機体は,2007年1月末に第48次JARE(日本南極地域観測隊)隊により,南極に持ち込まれており,S17地点にて運用実験が行われる予定です(結果は最新の報告をご覧下さい.).
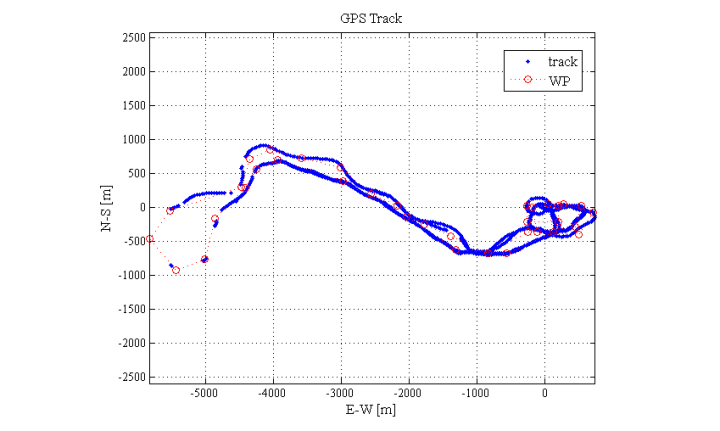
1時間15分,100kmの連続自動飛行成功の航跡図
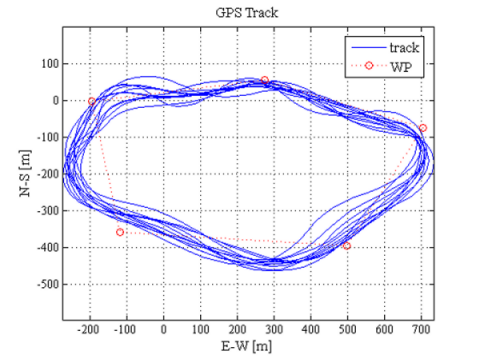
設定した5つのウェイポイントを周回する自動飛行の航跡図
デジタルカメラによる空撮(静止画及び動画)も試みています.自作した防振マウントにデジタルカメラを搭載し,UAVの胴体内に収め,デジタルカメラのシャッターをマイコンでコントロールすることにより撮影しています.撮影した写真(3枚)を合成したものとGoogle Earthとを以下に示します.
動画は,最新の報告からご覧いただけます.


今後はオートパイロットやガイダンス部分の完成度をより高め,長時間,長距離の飛行実証実験に取り組んでいきます.
効率よくミッションを遂行するために,進化アルゴリズム(Evolutionary Algorithm, EA)をもちいて,複数のUAVを運用し,それらのパスとタスクを同時に最適化する問題に取り組んでいます.パスの最適化とは周回すべきウェイポイントを如何に障害物を避け,効率よく巡回できるかをEAにより探索することです.タスクの最適化とは複数の周回すべきウェイポイントを最小の機数で如何に効率よく配分できるかをEAにより探索することです.
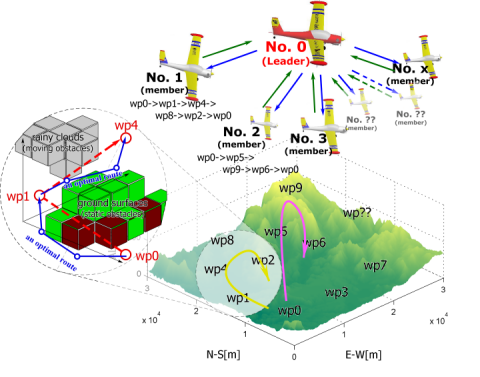
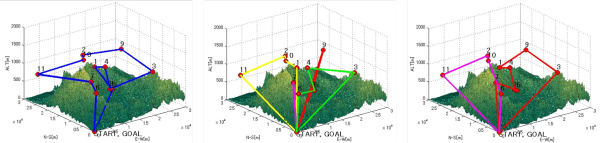
シミュレーションでは妥当な結果を得るまでに達しています.当面は,地上の計算機で最適化計算を行い結果を飛行中のUAVにアップロードし,パスを更新することにしています.単独機でのパスプランニングの飛行実証実験を手がかりに,順次複数UAVの実証へとアルゴリズムなどを改良していきます. 単独機でのリアルタイムパスプランニング飛行実証実験の結果は最新の報告を ご覧下さい.